香川県農業試験場・農業機械担当
[連絡先]0878-89-1121
[部会名]作業技術
[専門]機械
[対象]農業機械、稲類
[分類]指導
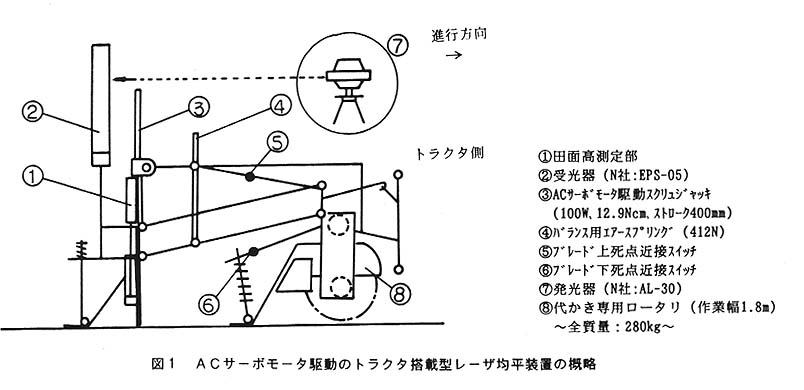
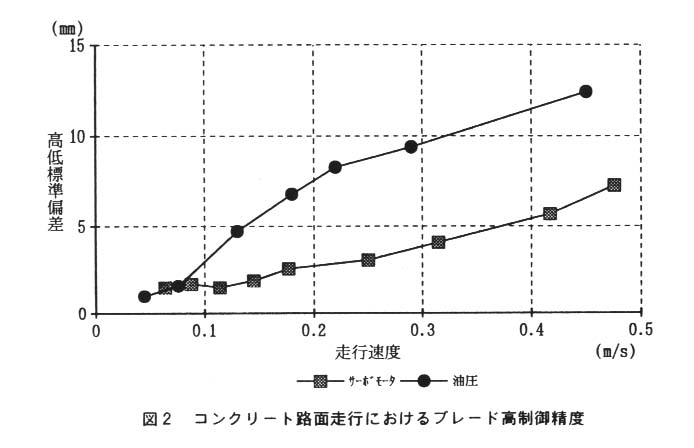
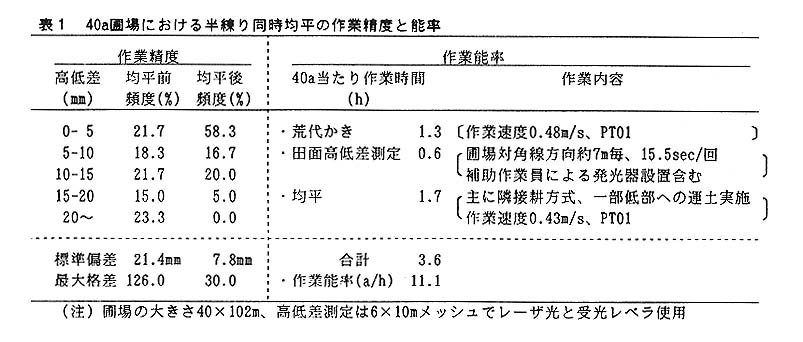
水稲の堪水直播においては、均一な出芽苗立ちを確保するのには田面の均平化が不可欠である。既存の均平装置にはレーザブルドーザやトラクタ牽引型のものがあるが大型で高価なため、大区画圃場が整備されている地域以外には適さない。また、ブレード高の制御駆動力がエンジン駆動の油圧式であるため、高精度な位置制御が困難である。そこで、中型トラクタに搭載できる半練り時の利用を前提としたACサーボモータ駆動のトラクタ搭載型レーザ均平装直を開発した。
[成果の活用面・留意点]
{kind=link}
{kind=link}
{kind=link}