特集1 田植機のイノベーション
自動運転田植機

農研機構農業機械研究部門 兼
農業ロボティクス研究センター
無人化農作業研究領域
小型電動ロボット技術グループ
山田 祐一主任研究員
乗用自動車の自動運転技術レベル4※1が現実味を帯びてきました。
農業機械にも自動運転化の波が来ており、世界初の自動運転田植機(レベル2※2)が市場に投入されました。
【用語解説】
*1 乗用自動車の自動運転技術レベル
| レベル0 自動運転 なし |
レベル1 運転支援 |
レベル2 部分的 自動運転 |
レベル3 条件付き 自動運転 |
レベル4 高度な 自動運転 |
レベル5 完全 自動運転 |
出典 : SAE(Society of Automotive Engineers)
*2 農業機械の安全性確保の自動化レベル
| レベル1 使用者が搭乗した状態での自動化 |
レベル2 ほ場内やほ場周辺からの監視下での 無人状態での自動走行 |
レベル3 遠隔監視下での無人状態での自動走行 |
出典 : 農林水産省「安全性確保ガイドライン」より
直進アシスト機能付田植機
稲作において田植えは短期間に作業が集中するために、作業人員の確保が難しいという課題があります。この課題を受け、農業機械メーカー各社は直進アシスト機能付田植機を開発・発売しています。直進アシスト機能付田植機は、直進のみですが、誰もが熟練作業者並みに真っ直ぐ田植えができるので、大規模経営の農業法人などで需要があるようです。そこで私は、自動化の度合いを高め、直進作業だけでなく、旋回やほ場全体の経路設計なども自動化し、熟練技術を必要とする田植機の運転が誰でもできる、2名以上で行う作業を1名で作業可能な自動運転田植機を考えました。
自動運転田植機のコンセプト
農研機構ではこれまでにも、「田植えロボット」(2008年)を開発しています。それはロングマット苗を使って、30アールのほ場の隅々まで、約50分かけてノンストップで完全無人で移植作業ができるものでしたが、ロングマット苗という特殊な苗が普及を阻みました。それゆえ、この自動運転田植機は、普及させることを前提に考えました(図1)。
自動運転田植機の基本コンセプトは3つ。
1つ目は、ロボット農機で必要とされる安全監視者が苗補給者を兼任し、1人1台運用とすることで人員を半減できます。2つ目は、直進と旋回の速度および精度を熟練者と同等以上とすること。誰でも高速・高精度の作業ができるようになるので、人員確保が容易になります。3つ目は、事前の経路設計を不要にし、ほ場に行けばすぐに使用できるようにすること。
| 直進アシスト田植機 | |
|---|---|
| △ | 2名(運転・補助) |
| ○ | マット苗 |
| △ | 直進のみ自動化 |
| ○ | 事前の経路生成が不要 |
| 自動運転田植機 | |
|---|---|
| ○ | 1名(監視・苗補給) |
| ○ | マット苗 |
| ○ | 外周以外の作業を自動化 |
| ○ | 事前の経路生成が不要 |
| 田植えロボット | |
|---|---|
| ◎ | 1名以下(複数台監視) |
| △ | ロングマット苗 |
| ◎ | すべての作業を自動化 |
| △ | 事前の経路生成が必要 |
出典 : 農業食料工学会誌(2019年81巻より)
熟練者の旋回技術を再現
特にこだわったのは「旋回」です。まず直進して、端まで行くと180度旋回し、隣の行程を直進して戻るという往復作業を繰り返します。作業行程の中で「旋回」は、植付作業をしない、いわゆる無駄な時間で、かつ操作に熟練していないともたついて旋回速度が遅くなっていたんです。熟練者なら、失敗しても切り返しすることなく、次行程にぴったり入って植えられる。これが意外と運転未熟者にとっては難しい。熟練者は難なくできますが、それでも一日中田植えをしていると、運転に疲れてきて最後のほうは作業が雑になりがちです。自分でも田植機は運転していたので、高速に旋回させるのは制御する上で難しいという感覚がありました。熟練者並みの操作にするために工夫したのは自動運転を制御するECU※3で、車両の位置と姿勢を推定して、目標舵角、前後進速度などをコントロールします。実用化には速度と精度の両立がキモで、速く正確にできることにこだわりました。
自動運転田植機の作業手順 1 ~ 6

【用語解説】
*3 ECU( Electronic Control Unit)電子制御ユニット : 小型コンピュータと各種制御回路をユニット化した装置。
普及しやすい価格を目指した設計
市販の8条植田植機を開発ベースに、比較的少ない改造で自動運転に対応できるように設計し、大幅なコスト増にならない工夫をしました。コストを押し上げそうなGNSS※4などの部品が普及価格になったこともよかったですね。
現場実証の段階で試作機に追加した機能としてモニターがあります。もともとモニターを付ける予定はなかったのですが、実際に農家の方に使ってもらったところ、操作性に関する改善要望があり、普及に向けては運転状況や経路を表示するモニターが必要だとわかりました。
【用語解説】
*4 GNSS( Global Navigation Satellite System) : 全球測位衛星システムGPS、準天頂衛星(QZSS、みちびき)、Galileoなどの衛星測位システムの総称。
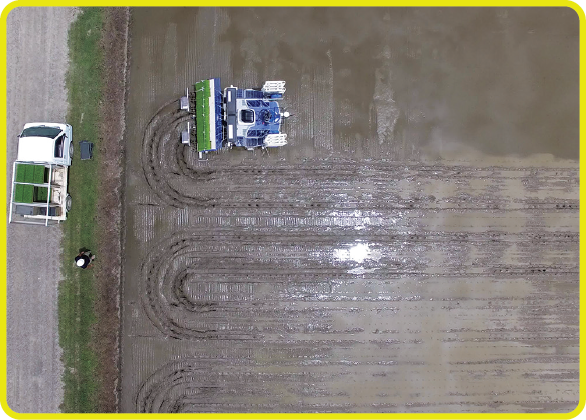
試作機の旋回風景

2022年2月、農業機械メーカーから市販された自動運転田植機
安全にも配慮
乗用自動車と比べて無人走行における安全上の課題は少ないです。とはいえ、何らかの原因で危険な状態になれば、監視者が携帯するペンダントリモコンの緊急停止ボタンで遠隔からでも即座に田植機を停止できます。リモコンの故障や通信障害で田植機が止められなくならないように、リモコンと田植機は常に通信し合って、通信が途絶えた場合は、即座に走行を停止するよう設計しました。どのような状況であっても安全・安心に作業できるようにすることも我々の研究使命の一つです。


首にかけて使うリモコン。シンプルなリモコンの操作面。デザインも使いやすさを意識している。
山田さんはどんな研究者?
研究者のアイデアで自ら試作機を作って、メーカーに提案し、商品化される事例は滅多にないんです。
山田さんは、ニュータイプです

農業機械研究部門
研究推進部 研究推進室
藤岡 修 上級研究員
企画から開発、試験など全部を自分でやれるのが農研機構の良いところです
