年度2019ステージ開発研究分野水産 (水産物)適応地域全国
キーワードロボット、缶詰製造工程、焼成切身、定量充填作業、省人化
| 課題番号 | 28033C |
|---|---|
| 研究グループ | 岩手大学, 株式会社津田商店, 石村工業株式会社 |
| 研究総括者 | 岩手大学 三好 扶 |
| 研究タイプ | 現場ニーズ対応型 Bタイプ |
| 研究期間 | 平成28年~30年 (3年間) |
| PDF版 | 多獲性魚類加工のためのロボットシステムの開発 (397.3 KB) |
1 研究の目的・終了時の達成目標
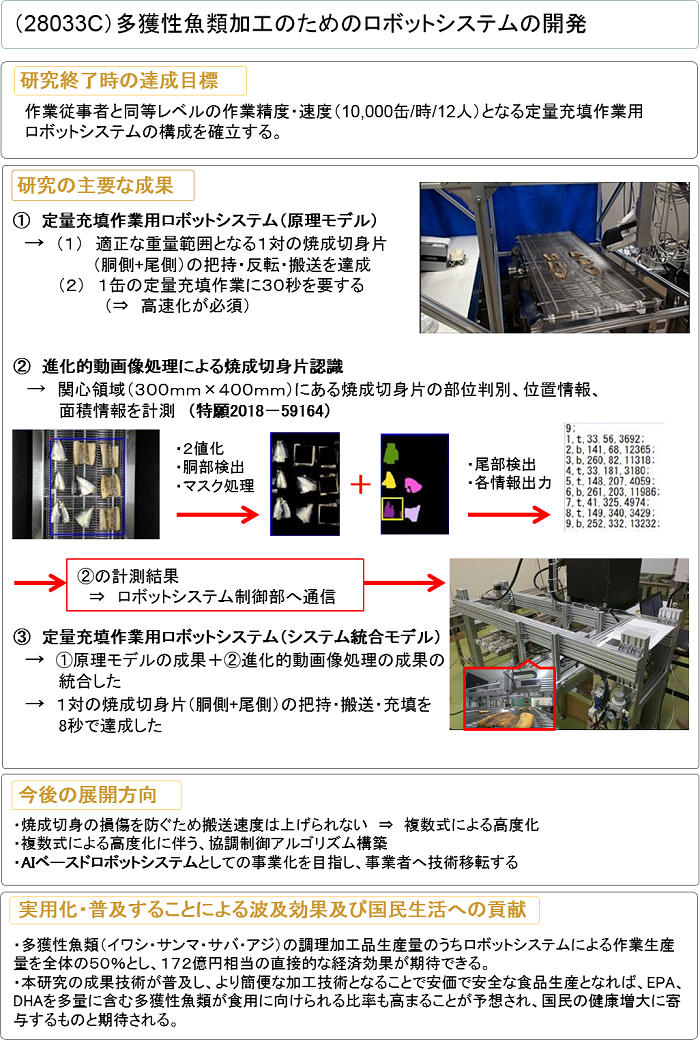
焼成切身の缶詰製造工程のうち、人手に依存し、全作業工程の35%程度を占めボトルネックとなっている「定量充填作業」の省人化を達成すべく、定量充填作業用ロボットシステムの構築を目的とする。このため、要素技術として(1)高速マニピュレーションが可能なロボットアーム、(2)焼成切身のハンドリングが可能なロボットハンド、(3)動画像処理による焼成切身の部位判別手法を研究開発し、各要素技術を統合したロボットシステムの試作を行い、生産数 (10,000缶/時) を満たすシステム構成を確立することを達成目標とする。
2 研究の主要な成果
- 適正な重量範囲となる1対の焼成切身片 (胴部+尾部) の把持・反転・搬送を可能にする、定量充填作業用ロボットシステム (原理モデル) を試作した。
- 進化的動画像処理により、ベルトコンベア上を無作為に流れる焼成切身片群の認識 (部位判別、位置情報、面積情報取得) と、ロボットシステム制御部への通信手段を確立した。
- I 、II から、定量充填作業用ロボットシステム (システム統合モデル) を試作し、1対の焼成切身片 (胴側+尾側) の把持・搬送・充填を8秒で達成した。
- これらの成果から、FOOMA JAPAN2018 AP賞出展者評価部門を受賞した。
公表した主な特許・品種・論文
- 特願 2018-59164 物体検出装置、物体検出方法、ならびに物体取出装置 (出願人 : 岩手大学・株式会社津田商店)
- 三好扶他. 缶詰製造工程の定量充填作業に資するロボットシステム (試作モデル) 開発, 日本食品工学会誌19(3), 173-184 (2018).
3 開発した技術・成果の実用化・普及の実績及び今後の展開
- 定量充填作業用ロボットシステム (システム統合モデル) の成果まででは、事業化および現場導入に至らないことから、更なる高度化・他魚種への対応を行い、事業化に向けた技術移転を実施する。
- 重量推定アルゴリズムの亢進、オンライン学習による搬送対象の組み合わせ判別を継続開発し、他業種にも展開可能な、AIベースドロボットシステムとして完成を目指す。
【今後の開発・普及目標】
- 2年後 (2020年度) は、焼成切身に関する定量充填作業を満たすシステム構築を完遂し、上市する。
- 5年後 (2023年度) は、上市した定量充填作業用ロボットシステムの販売額1億円を目指す。
- 最終的には、他魚種・他業種へ対応したAIベースドロボットシステムとして販売、普及を目指す。
4 開発した技術・成果が普及することによる波及効果及び国民生活への貢献
- 多獲性魚類 (イワシ・サンマ・サバ・アジ) の調理加工品生産量のうちロボットシステムによる作業生産量を全体の50%とし、作業従事者の付加価値等を鑑みると、172億円の直接的な経済効果が期待できる。
- 本研究の成果技術が普及し、より簡便な加工技術となることで安価で安全な食品生産となれば、EPA、DHAを多量に含む多獲性魚類が食用に向けられる比率も高まることが予想され、国民の健康増大に寄与するものと期待される。
問い合わせ先 : 岩手大学 三好 扶 TEL 019-621-6357