開発の背景と経緯
近年、農業機械の機能の高度化に伴い、より高能率、高精度な農作業が実現されるようになりました。一方で機械の構造は複雑になり、製造コストの増大、メンテナンス性の低下が危惧されています。
従来型乗用田植機の植付部(苗載台を含む)は、各駆動部を機械的に連結する事で動力を伝達するとともに、車輪の回転状態と連動して動作する構造となっています。
動力の伝達経路上には、クラッチや過負荷制限装置、各種設定変更のための変速機等が存在しており、複雑な構造となっています。
そこで、これらの複雑な動力伝達系を簡素化し、構造をシンプルにできる新しい田植機植付部の開発に取り組みました。
開発機の概要
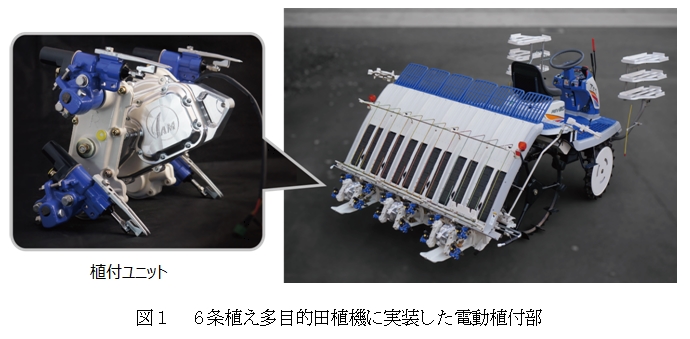
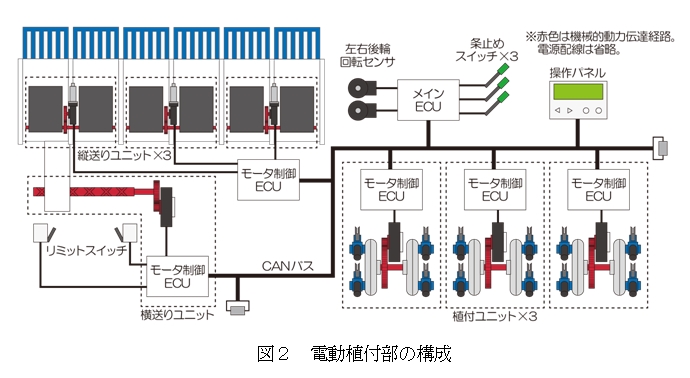
- 電動植付部は、植付爪駆動部(植付け2条分が一組)、苗載台の横送り・縦送りの各駆動部に電気モータ(以下、モータ)と減速機及びそれを制御するECU※1から構成されるユニット構造です。これにより、従来型田植機と比較して動力伝達系が簡素化される(図1、2)とともに、製造時の組立て工程や故障発生時にユニットごと着脱することができ、メンテナンス性が向上します。
- 各モータは電子制御され、株間を無段階、横送り回数を1回単位できめ細かく設定でき、従来型田植機では必須であったギアの組合せによる変速機構は不要です。また、植付爪はモータ制御ECUからの制御によって等速にも不等速にも自在に回転させることができ、疎植(条間、株間ともに30cmに設定した移植方法)時に従来型田植機では必須であった、不等速駆動機構は不要となります。
- 全てのECUはCANバス※2で接続されており、車速センサと接続されたメインECUから送信される制御信号に基づいて各モータ制御ECUがモータを制御する事により、植付部全体が車速に連動して動作します(図2)。
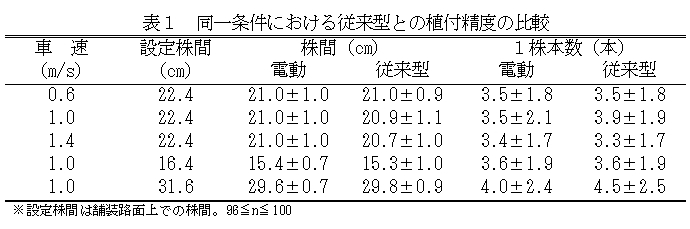
- 開発した電動植付部を多目的田植機に装着する場合、PTO軸を接続する必要がないため、従来の機械式植付部よりも着脱が容易に行えます。開発した電動植付部と、従来の機械式植付部を多目的田植機の走行部に装着し、同じ設定条件で比較試験を行った結果、同等の植付精度を示しました(表1)。
今後の予定・期待
- 複雑な動力伝達系が不要となることで、田植機の構造の簡素化、軽量化が期待できます。また、同じ構造で様々な植付条数のラインナップに対応できます。
- 苗載台に苗送り量を検知するセンサを組込むことで、ほ場に植える苗量をコントロールすることができ、計画的な苗生産による資材費低減効果が期待できます。
- モータによる車速連動制御は田植機植付部だけでなく、播種機など他の作業機にも広く応用でき、多目的田植機の利用場面拡大につながります。
用語の解説
※1 ECU:電子制御ユニット。センサ等の信号を取り込み、予めプログラムされた手順に従ってモータ等の装置を制御する。
※2 CAN:自動車用に開発された通信規格の一種。バスと呼ばれる共通伝送路を使用して複数のECU間のデータの送受信が可能。農業機械においても普及が進みつつある。