ポイント
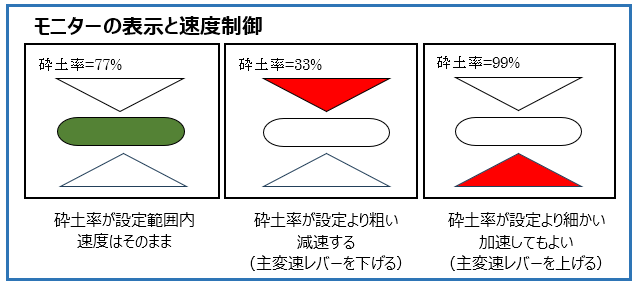
農研機構は、耕うん時の土壌の砕土率1)をリアルタイムで計測するシステムを開発しました。砕土率は作物の出芽率にも影響する重要な指標ですが、耕うん作業中の確認が困難でした。開発した砕土率計測システムにより、トラクタの運転席モニターで砕土率をリアルタイムで確認できるようになりました。耕うん状況に応じた作業速度の調整など、作業能率の向上と出芽率改善効果が期待できる技術です。
概要
近年、食料安全保障の観点から大豆、麦等の国内生産の重要性が高まっています。これらの作物の生産性向上のためには出芽率の向上が必要であり、出芽率には砕土率が影響するとされています。
砕土率とは、土壌中の土塊で長径が20mm未満の土塊が占める割合を重量ベースで表したものです。砕土率が低い、つまり、大きい土塊が多い状況だと、種子と土壌との密着が悪くなるため出芽率が下がり、収量にも影響します。従来、砕土率の計測は、人の手によりふるいを使って土塊を分離した後、重量を測る必要があり、農業現場で行われることはほとんどありませんでした。
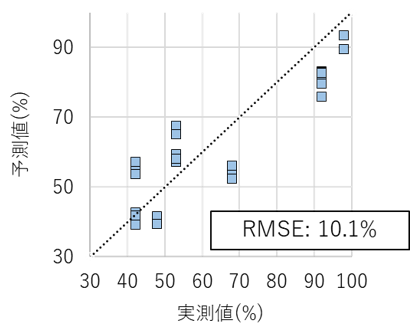
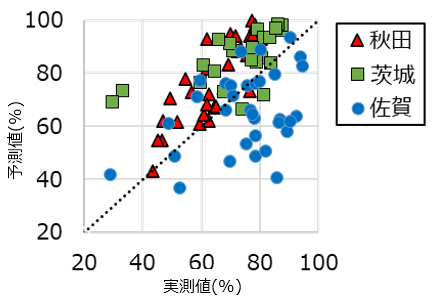
農研機構では、これまでカメラで撮影した土塊の画像から砕土率を計測する技術の開発に取り組んできました。今回、この技術を自動化、高速化したことで農業機械への搭載が可能になり、耕うん作業中にリアルタイムで砕土率を確認できるようになりました。
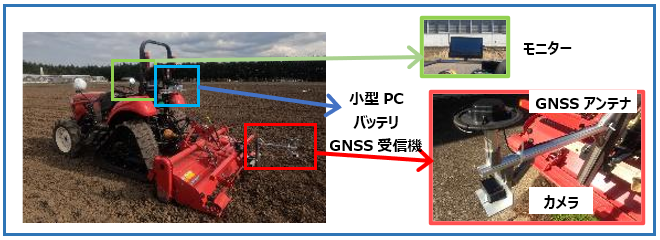
本システムは、カメラ、PC、GNSS2)とモニターから構成され、カメラが取得した耕うん直後の土壌表面の画像をPCで画像処理することにより、砕土率を計測しています。
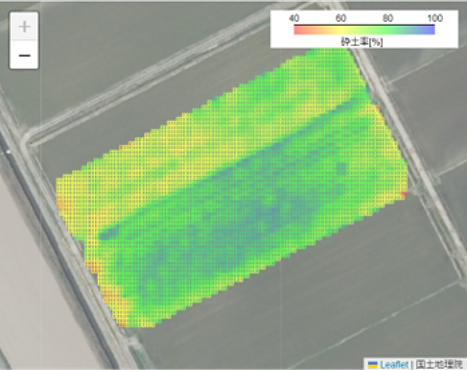
砕土率の計測結果はトラクタの運転席に設置したモニターに表示されるので、耕うん状況に応じた作業速度の調整などが可能です。また、砕土率の計測と同時にGNSSにより位置情報を取得しているため、オフラインでほ場の砕土率マップを作成することもできます。
今後、リアルタイム砕土率計測システムを用いることで、ほ場全体の砕土率と耕うん時の作業能率の向上、出芽率改善効果を検証し、早期の社会実装を目指します。
関連情報
予算 : (BRIDGE)(農水省戦略的プロジェクト研究推進事業にアドオン)、運営費交付金
特許 : 特願2024- 44094
農業ロボティクス研究センター
センター長中川 潤一
露地ロボティクスユニット
齋藤 秀文、野田 晋太朗、小林 有一
転換畑研究領域畑輪作システムグループ
髙橋 智紀、建石 邦夫、草 佳那子、大野 智史
渉外チーム長野口 真己