3次元レーザスキャナによる草高計測の精度向上
要約
3次元レーザスキャナ(LiDAR)は、高密度レーザ(数10万点/秒)を用いて対象物との距離を測り、3次元形状を計測する機材である。本機材と適切なデータ処理により、従来の写真測量(SfM)の約1/2の誤差で牧草の草高計測が可能であり、草地管理の高度化が期待できる。
- キーワード:3次元レーザスキャナ(LiDAR)、写真測量(SfM)、牧草、草高、誤差
- 担当:北海道農業研究センター・酪農研究領域・放牧・草地管理グループ
- 代表連絡先:
- 分類:研究成果情報
背景・ねらい
草地管理において、草高は基本的な情報の一つとして重要である。しかし、定規を用いた計測手法では広範囲の計測が出来ず、またドローン等を活用した写真測量では葉先の計測が難しいためにおおよそ10 cm以上の誤差が出ることが問題となっている。そこで本研究では、携帯型LiDAR(Light Detection and Ranging)を用いて草高を計測し、定規を用いた実測値と比較することでその計測誤差を明らかにする。また、LiDAR計測で得られる1次データ(点群)から草高を計算する際の、計測誤差を最小にするデータ処理方法についても明らかにする。
成果の内容・特徴
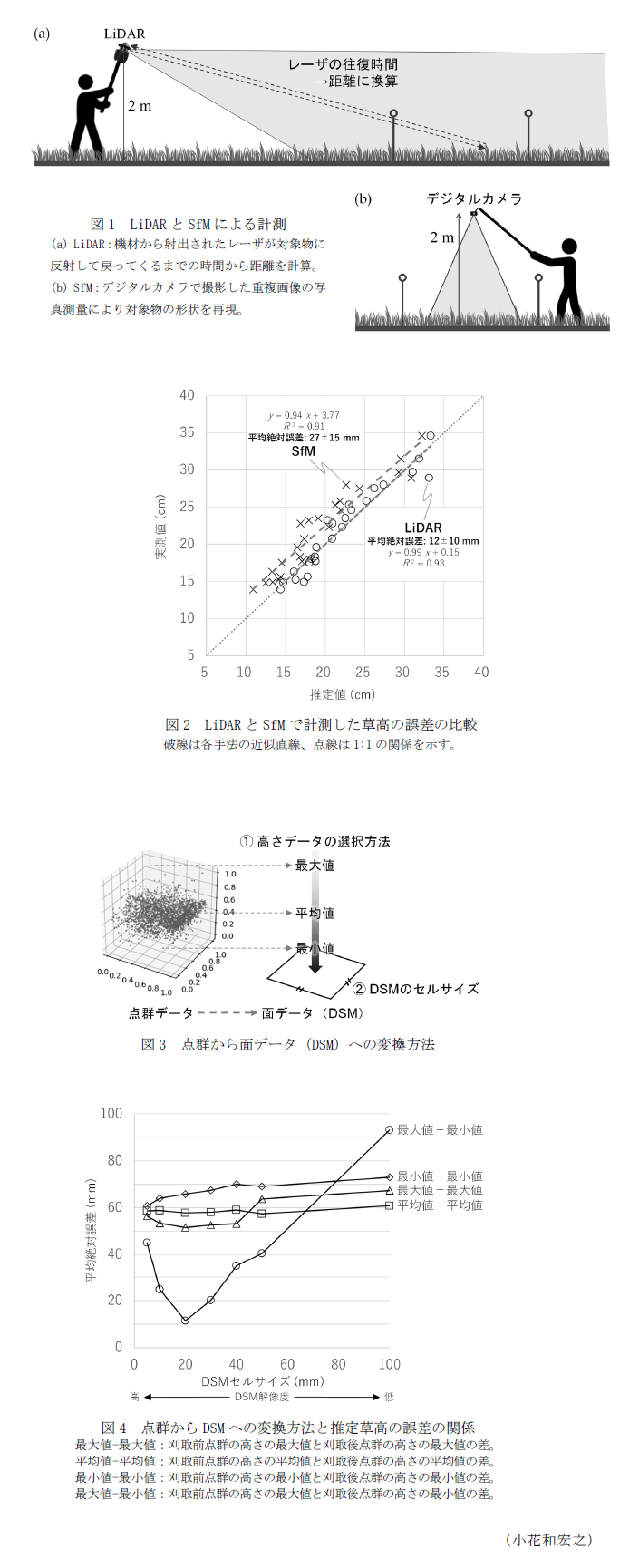
- LiDAR(PX-80、Paracosm社)および写真測量(Structure from Motion, SfM)手法により、約2 mの高さから採草地(ペレニアルライグラス)を計測し(図1)、刈り取り前の計測から葉群表面、刈り取り後の計測から地面の形状データを取得する。両形状の高さの差から草高を推定し、定規による実測値と比較した場合、LiDAR手法の誤差(平均12 mm)はSfM手法の誤差(平均27 mm)に比べて約1/2に低減する(図2)。したがって、LiDAR手法は草高の正確な計測に有効である。
- LiDAR手法で取得した点群データから、草高を計算するために面データ(Digital Surface Model, DSM)に変換する方法(図3)に関して、以下の2つの条件は誤差に大きく影響する(図4)。したがって、草高を高精度で推定するためには、LiDARデータの適切な後処理が必要である。
- 高さデータ:DSMの各セルに含まれる点群データから各セルの高さデータを選択する際に、刈り取り前の点群データの高さの最大値および刈り取り後の点群データの高さの最小値を使用することで、推定草高の誤差は最小になる。刈り取り前後それぞれの点群の平均値を利用する一般的な方法に比べて、同方法は誤差が最大約1/5に低減される。
- DSMのセルサイズ:約10 mm程度の葉幅を持つ牧草を計測対象とした本研究の場合、DSMのセルサイズ(解像度)を20 mmにすると推定草高の誤差は最小になる。たとえばDSMセルサイズを100 mmにした場合に比べて20 mmの場合は誤差が約1/8に低減される。
成果の活用面・留意点
- 本研究で使用したLiDAR機材は高額(約500万円)であり、また携帯型LiDARを用いた徒歩移動により計測するため広範囲の計測は難しい。しかし、定規を用いた計測では不可能な高密度計測が可能であり、またSfMよりも高精度な計測が可能である。LiDARの小型・軽量・低価格化は急速に進んでおり、近い将来、安価で運用性の高いLiDAR搭載型ドローンが市販化される見込みであるため、低コストな導入および広域計測の実現性は高い。今後、普及・指導機関などにおける活用が期待される。
- 本研究は草高30 cm程度の牧草を対象とした結果である。LiDAR計測の有効性や最適な運用方法、データ処理方法、適用限界等をさらに正確に評価するためには、今後、計測対象植物の形状、大きさ、密度等の条件を増やした計測および解析を実施する必要がある。
- 地面の形状の計測に関して、本研究では牧草刈り取り後に実施したが、刈り取り前の草高の把握を可能とするために、牧草が成長を開始する前の早春における計測が望ましい。なお、一度地面高の計測をすれば二度目以降は必要が無い。
具体的データ
その他
- 予算区分:交付金、その他外部資金(28補正「AIプロ」)
- 研究期間:2019~2020年度
- 研究担当者:小花和宏之、吉利怜奈、渡邊也恭、坂上清一
- 発表論文等:Obanawa H. et al. (2020) Sensors 20:4809 doi:10.3390/s20174809