畦畔や整備法面での草刈り作業の負担を軽減する機動性の高い電動草刈機
要約
畦畔や法面を安定走行する機動性を有し、遠隔操作で草刈り作業ができる電動草刈機。一定条件下では、畦畔に沿って自動走行(倣い走行)しながら作業を行う機能をもち、取扱性や安全性が高く、作業負担が少ない。
- キーワード:草刈機、電動式、畦畔、法面、遠隔操作、倣い走行
- 担当:革新工学センター・土地利用型システム研究領域・栽培管理システムユニット
- 代表連絡先:電話 048-654-7000
- 分類:普及成果情報
背景・ねらい
畦畔除草は作目を問わず行う必要のある作業であり、刈払機や自走式草刈機を用いて作業を行う機械除草が一般的であるが、雑草の生育が旺盛な高温期に繰り返し行わなければならないことから、作業者の労働負担が大きく、軽労化が求められている。また、刈払機や自走式草刈機には、高速回転する刈刃が使われているため、飛び石、作業機の反発等による危険が伴い、エンジンの振動や排ガス、作業時に発生する土埃等にも曝されることから、作業環境の改善も必要である。
そこで、主に水田や転換畑の畦畔除草作業を対象として、畦畔や整備法面を安定走行できる機動性をもち、遠隔操作で草刈り作業を行うことができる自走式の電動畦畔草刈機を開発する。さらに、一定条件下では、畦畔に沿って自動走行(倣い走行)しながら作業を行う機能を有すること等により、取扱性や安全性を高め、草刈り作業における作業負担の軽減や作業環境の改善を図る。
成果の内容・特徴
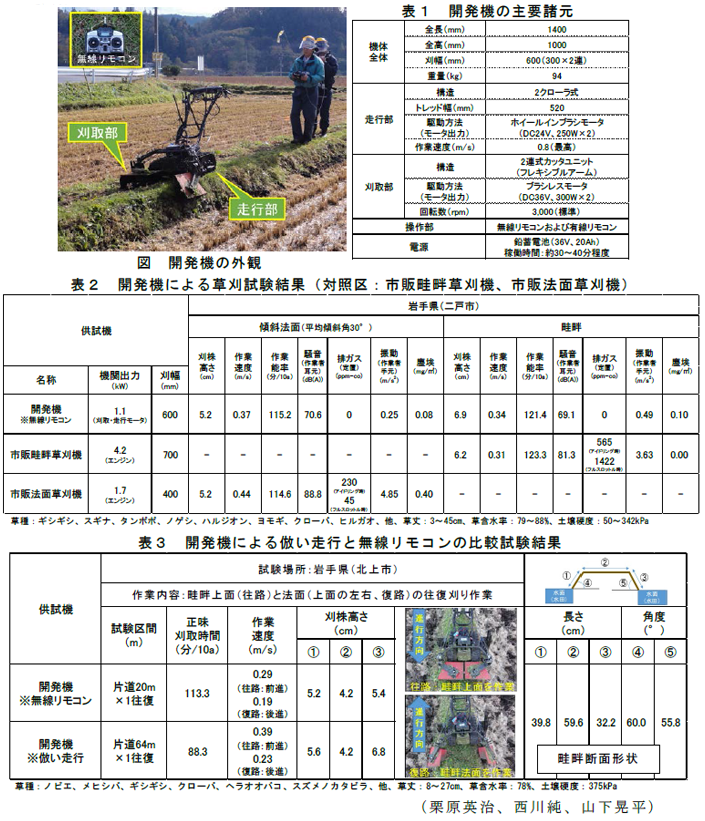
- 開発機は、走行部、刈取部、操作部などから構成される電動式の草刈機である(図、表1)。各部の電源はバッテリから供給され、走行部は走破性の高い一対のクローラ式で、刈取部は走行部の前側に位置する2連式のカッタユニット(回転刃)構造である。操作部は、無線リモコンによる遠隔操作(左右クローラの前進・後進、速度調節)と刈取部の動作を操作する手動操作を可能としている。
- 開発機は、上面幅が50cm以上の畦畔上および傾斜角32°以下の法面を走行しながら草刈り作業が可能である。畦畔作業時は、刈取部が畦畔の上面および法面に適用するよう、作業者は機体に設けたレバーを操作して、左右それぞれフレキシブルアームで支持されたカッタユニットを前進方向に対して最大90°(右側ユニットは右側に90°、左側ユニットは左側に90°)、畦畔法面接地角度を最大80°まで調節する。
- 開発機は、市販機(畦畔草刈機、法面草刈機)と比較し、刈取精度、作業能率に関しては同等である。さらに、作業者は遠隔操作(無線リモコン)により機体から離れて作業できるため、安全性も高く、振動・排ガス・騒音の影響が小さく、作業環境が大幅に改善するため、作業負担が少ない(表2)。
- 開発機は、途中に障害物(石礫、溝、杭、廃棄物等)が無く、比較的平坦で直線的かつ十分な強度を有する畦畔(畦塗機等で成形され、上面幅50cm以上、高さ30cm以上、法面傾斜角度が60°程度)では、畦畔表面に接地して走行を誘導する倣い車輪を用いた機構により、畦畔に沿った自動走行(倣い走行)での作業が可能である(表3)。
普及のための参考情報
- 普及対象:水田作・畑作に従事する農業者
- 普及予定地域・普及予定面積・普及台数等:全国、2,000ha(導入可能面積137,600ha[水田畦畔面積]×1.5%[導入率])、1,000台(5年間)
- その他:2018年度に市販化予定である。なお、稼働時間を拡大し、実用性を高めるため、市販機においては、バッテリ等の改良が検討される予定。
具体的データ
その他
- 予算区分:緊プロ
- 研究期間:2014~2016年度
- 研究担当者:栗原英治、西川純、山下晃平、林和信、吉田隆延、水上智道、高橋昭喜(岩手農研セ)、戸田勉(ササキコーポレーション)、甲地重春(ササキコーポレーション)、横浜雅透(ササキコーポレーション)
- 発表論文等:
1)栗原ら「自走草刈機」特願2016-073549(2016年3月31日)
2)栗原ら「草刈機用の刈刃部」特願2016-073550(2016年3月31日)