非熟練者1人でも高速・高精度な田植えが可能な自動運転田植機
要約
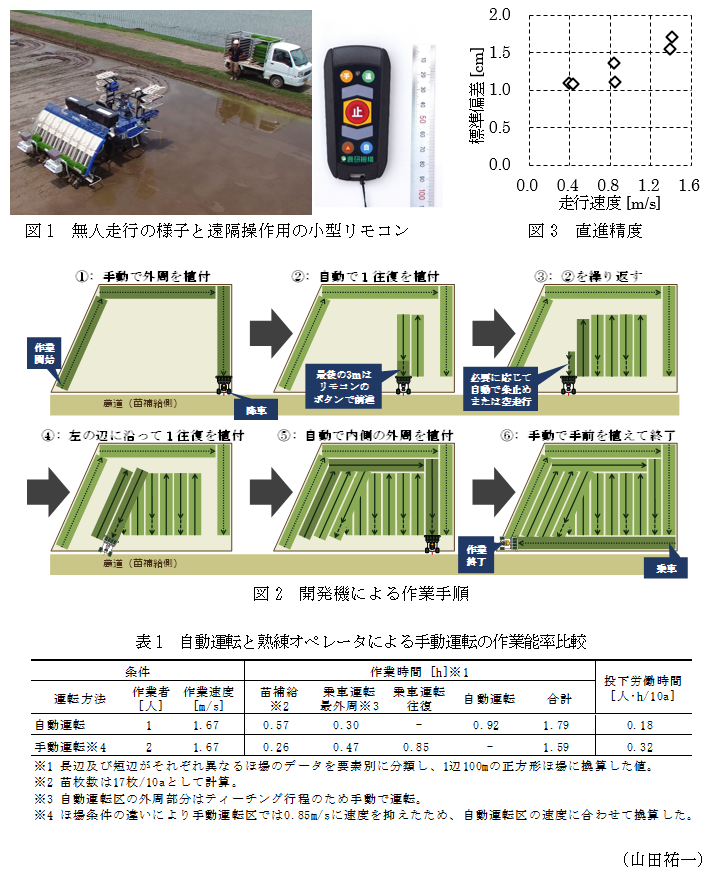
自動運転機能を有し、非熟練者の1人1台運用でも高速・高精度な作業が可能な田植機である。直進精度は標準偏差で2cm以下、旋回時間は11.2sで、熟練オペレータと補助者による慣行2人作業と比較して投下労働時間を44%削減できる。
- キーワード:田植機、自動運転、ロボット、リモコン、GNSS
- 担当:農業技術革新工学研究センター・次世代コア技術研究領域・自律移動体ユニット
- 代表連絡先:電話048-654-7000
- 分類:普及成果情報
背景・ねらい
農地集積と営農規模拡大に伴い、農業機械のオペレータ不足が課題となっている。特に農繁期に合わせた熟練オペレータの雇用は難しく、これが規模拡大の妨げとなっている。このため、より少人数で作業でき、さらに熟練オペレータを必要としない農業機械が望まれている。この解決策の1つとしてロボット農機の実用化が進められているが、田植機においては定期的な苗補給が必要となることから、完全自動化が難しいという課題があり実用化には至っていない。
そこで、自動運転機能によってオペレータを不要とするとともに、「農業機械の自動走行に関する安全性確保ガイドライン」において無人走行時に必要とされている安全監視者が苗補給者を兼ねることで、苗補給の問題を解消しつつ慣行作業より人員削減が可能な田植機を開発する。
成果の内容・特徴
- 8条植えの田植機をベースとし、RTK-GNSS受信機とIMU(慣性計測装置)の情報を基に、操舵角、前後進速度、作業機の昇降、植付クラッチの入切などを自動的に操作することで無人走行が可能な田植機である(図1)。
- ほ場の最外周以外は無人走行が可能で、苗補給を行う農道に隣接している辺を除く外周を手動運転で作業(以下、ティーチング)すれば、その内側の領域を無人走行できる(図2)。長方形以外の多角形ほ場、湾曲したほ場などにも対応できる。このような変形ほ場であってもティーチングをするだけで自動的に経路が生成されるため複雑な操作は必要ない。
- 無人走行中の田植機は、小型リモコン(図1)を使用して田植機から見通し約300mの範囲内で作業速度の変更や緊急停止が可能である。リモコンと田植機は常時通信しており、通信途絶時は速やかに停止する安全機能を備えている。田植時の水田は代掻きされており、見通しがよいことに加えて第三者が突然ほ場内に侵入して田植機と接触する事も想定しにくいことから、使用者はリモコンを携帯して安全監視を行いつつ、苗の準備作業などを行うことが可能である。
- 直進作業は田植機の最高速の1.86m/s(スリップ率10%で1.67m/s)でも作業でき、直進精度は標準偏差2cm以下(図3)である。枕地での後進を含む旋回1回あたりの所要時間は11.2±0.4sで、熟練オペレータ(15.2±2.4s、経験年数約20年、田植え面積約10ha/年)以上の速度で旋回可能である。
- 1辺100mの1ha正方形ほ場において田植機の最高速で作業した場合、自動運転の1人作業が1.79h、熟練オペレータによる慣行2人作業が1.59hで、単位面積当たりの投下労働時間としては44%の削減効果が見込める(表1)。
普及のための参考情報
- 普及対象:農機メーカ、制御機器メーカ
- 普及予定地域・普及予定面積・普及台数等:農機メーカ1社に技術移転しているほか、研究機関向けモニター機を限定製作し、現地実証を経て市販化予定である。
- その他:モニター機はスマート農業加速化実証プロで各地の試験に利用される予定。
具体的データ
その他
- 予算区分:その他外部資金(SIP)
- 研究期間:2014~2018年度
- 研究担当者:山田祐一、藤岡修、山下貴史、橘保宏、塚本茂善、西脇健太郎、重松健太
- 発表論文等:
- 山田、特願(2018年3月16日)
- 山田、特願(2018年11月15日)