ロボット・自動化農機の安全性確保のための安全要件と安全性検査の実施方法及び基準
要約
国際規格及び「農業機械の自動走行に関する安全性確保ガイドライン」等に基づき策定した、ロボット・自動化農機が満たすべき安全要件と安全性検査の主要な実施方法及び基準である。人・障害物検出機能、自動操舵機能等の安全性評価に活用できる。
- キーワード:ロボット農機、自動化農機、ISO18497、ISO10975、安全性検査
- 担当:農業技術革新工学研究センター・安全検査部・ロボット安全評価ユニット
- 代表連絡先:電話048-654-7000
- 分類:普及成果情報
背景・ねらい
ロボット農機の実用化を見据え、「農業機械の自動走行に関する安全性確保ガイドライン(平成30年3月)」が農林水産省により策定され、国際規格としては「Agricultural machinery and tractors -- Safety of highly automated agricultural machines -- Principles for design(ISO 18497:2018)」が制定された。また、国のスマート農業加速化実証プロジェクトが計画されるなか農研機構においてもSociety5.0の早期実現を目指し、ロボット等の先端基盤技術の社会実装を推進している。そこで、農研機構革新工学センターで実施する安全性検査におけるロボット・自動化農機検査の評価試験方法を策定し、実施することにより、安全なロボット農機の開発・普及に貢献する。
成果の内容・特徴
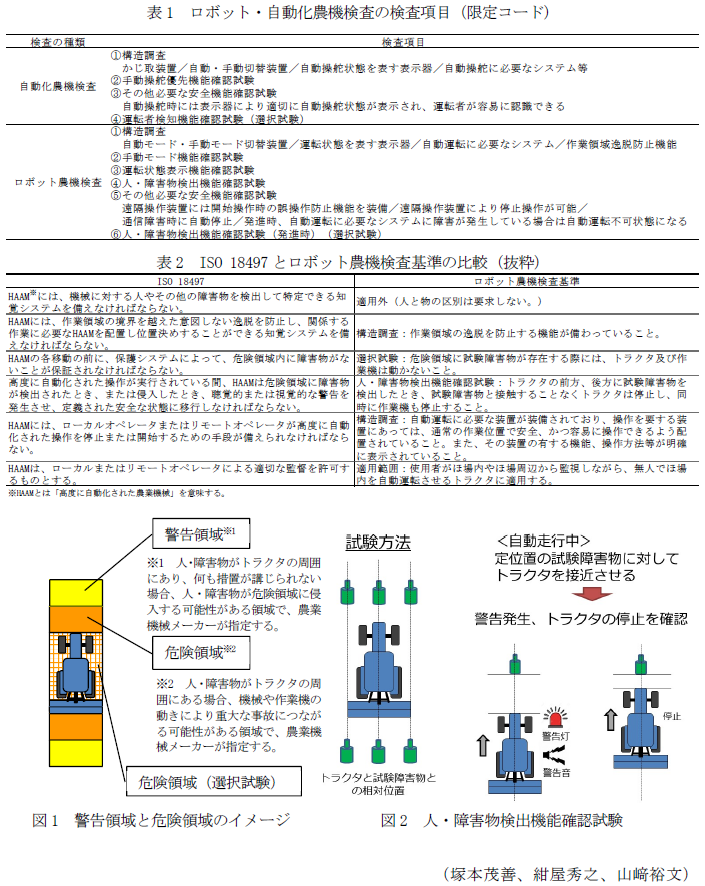
- 本成果は、「農業機械の自動走行に関する安全性確保ガイドライン」、ISO 18497、ISO 10975、等に基づき、戦略的イノベーション創造プログラム(SIP)等の成果を踏まえ、ロボット・自動化農機が具備すべき技術要件とその評価方法について限定コードとして取りまとめたものである(表1)。
- 安全性検査におけるロボット・自動化農機検査の実施方法及び基準は、ISO 18497、ISO 10975で定義されている内容を基にロボット農機及び自動化農機が現行の技術水準に照らして最低限満足しなければならない要件について検討し、策定したものである(表2)。
- ロボット・自動化農機検査にはロボット農機検査と自動化農機検査があり、前者は使用者がほ場内やほ場周辺から監視しながら無人でほ場内を自動運転させるトラクタを、また、後者はほ場内で使用する自動操舵機能を有し運転者の乗車を必要とするトラクタ、田植機、コンバイン(自脱型・普通型)をそれぞれ対象としている。
- ロボット農機で重要となる人・障害物検出機能は、トラクタを前進又は後進させたとき、警告領域に試験障害物が入った場合には警告を発する必要がある。また、危険領域に試験障害物が入った場合には試験障害物と接触することなく停止し、同時に作業機も停止する必要がある(図1)。警告領域、危険領域はトラクタの前方及び後方に設定され、選択試験時には危険領域はトラクタの側方にも設定される。
- ロボット農機(ロボットトラクタ)の人・障害物検出機能の確認は、トラクタを自動モードに設定し、自動運転可能な最高速度で走行させた状態で行い、試験障害物をトラクタの前方・後方ともに、トラクタの車両軸方向中心線上及びその中心線と平行で農業機械メーカーが指定する装着可能な作業機の最外側を通る直線上に設置し(図2)、試験障害物が警告領域、危険領域に入った際のロボットトラクタの挙動を確認して行う。
普及のための参考情報
- 普及対象:農業機械メーカー
- 普及予定地域・普及予定面積・普及台数等:日本国内
- その他:本安全要件は2018年度より農研機構革新工学センターが実施する安全性検査のロボット・自動化農機検査の主要な実施方法及び基準に導入され、合格型式の認定を行った。今後、トラクタ以外のロボット農機に対しても本基準を参考とすることができる。
具体的データ
その他
- 予算区分:交付金、その他外部資金(SIP、ロボット技術安全性確保策検討事業)
- 研究期間:2017~2018年度
- 研究担当者:塚本茂善、紺屋秀之、山﨑裕文、藤井幸人、菊池豊
- 発表論文等:
- 農研機構(2018)「ロボット・自動化農機検査の主要な実施方法及び基準-ロボット農機(トラクター)用-」http://www.naro.affrc.go.jp/laboratory/iam/contents/test/pdf/kensa_001_002.pdf(2018年7月)
- 農研機構(2018)「ロボット・自動化農機検査の主要な実施方法及び基準-自動化農機用-」http://www.naro.affrc.go.jp/laboratory/iam/contents/test/pdf/kensa_001_003.pdf(2018年7月)