トマトの収穫作業管理を支援する自動走行型着果モニタリング技術
要約
労務管理の最適化のために、労働時間が長く、繁閑差の要因となりやすい収穫作業時間を予測する必要がある。収穫作業時間に影響する収穫可能な果実数を推定するため、本技術は、夜間に作業レール側の植物体のみ写る画像を自動で収集し、画像中の果実を高精度に計数することができる。
- キーワード:施設園芸、深層学習、果実計数、生育情報収集、労務管理最適化
- 担当:農業技術革新工学研究センター・高度作業支援システム研究領域・高度施設型作業ユニット
- 代表連絡先:電話 048-654-7000
- 分類:研究成果情報
背景・ねらい
近年、施設園芸において大規模化の動きが広がっている。施設面積が概ね1.0ha以上の経営体では、数十名から百名規模での雇用による組織的な運営がされている。このような法人では、生産コストの約3割を人件費が占めており、雇用労力の有効活用が課題となっている。トマトのような果菜類の施設栽培では、収穫作業は労働時間が長く、収穫果数の増減により作業の繁閑が生じやすい。収穫作業の計画を効率化するために、作業者のシフトを管理する作業管理システムが期待されているが、現状、日々の収穫作業時間を予測する手法は確立されていない。そこで、本研究では、収穫作業時間を予測するために必要な、収穫可能な果実数の推定を可能とする着果モニタリング技術を開発する。
成果の内容・特徴
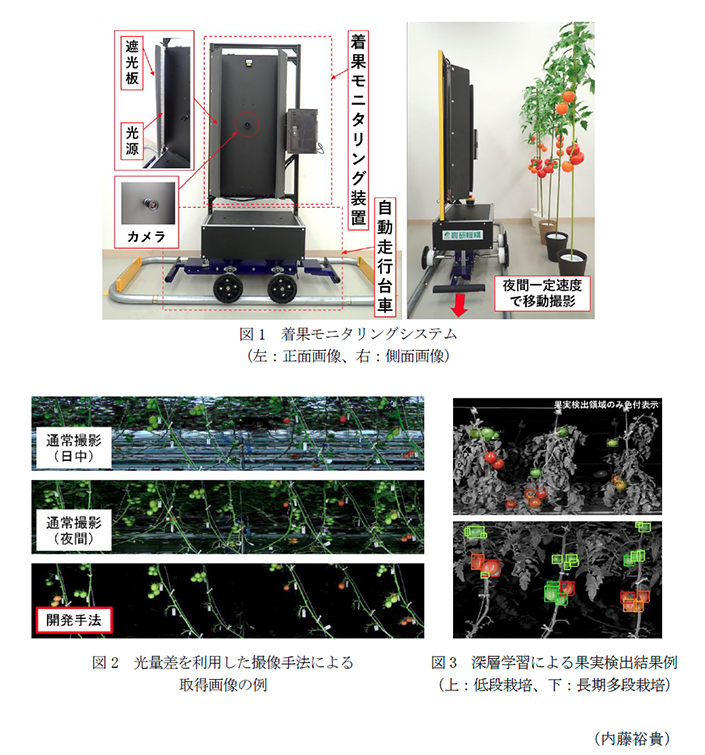
- 本システムは、自動走行台車と着果モニタリング装置により構成される(図1)。
- 自動走行台車は、夜間予め設定した時刻に、一定速度で作業用レール上を自動走行する。自動走行台車に搭載した着果モニタリング装置は、一定速度で移動しながら植物体の展開画像を生成し、画像分析により画像内に含まれる収穫可能な果実を計数する。
- 着果モニタリング装置は、夜間撮影を行うことで、日照変化の影響を受けずに計測が可能である。装置には、光量差を利用した撮像機構を採用している。撮影に際し、レール側手前株のみ光が照射されるよう遮光板の角度を調整することで、手前株のみ写る植物体画像を収集することができる(図2)。
- 着果モニタリング装置は、果実を検出する画像分析に、人物や車両等を検出する深層学習による物体検出モデルを利用している。果実検出モデルは、Web上に公開されている物体検出モデルをもとに、農研機構のハウスで収集したトマト果実画像データセットを用いて学習させることで、果実を検出するモデルを構築している。
- 検出された果実画像に含まれる画素色情報より、果実の成熟度を評価し、成熟が進んだ順に分類する。これにより、画像内に含まれる果実の位置と熟度が特定され、撮影列の収穫可能な果実数を推定する(図3)。
- 画像には分析対象となる手前株のみ写るため、果実検出の精度を向上させるための前処理が不要であり、深層学習による画像認識技術の性能を発揮できる。農研機構で実施した栽培試験に本システムを供試した結果では、検証に使用した植物体画像に含まれる果実のうち、低段栽培条件で188果のうち178果(95.2%)を検出し、長期多段栽培試験で1,089果のうち1,022果(93.8%)を検出する。
成果の活用面・留意点
- 本システムは作業レールの敷設が前提となる。別で開発するレール間移替装置を併用することで、圃場内複数列の計測が可能になる。
- 本ハードウェアは、着花計測、病虫害・生理障害株検出、植物体の計測に基づく葉面積計測など、他用途の画像解析のための自動走行機能付き画像入力装置としても、利用可能である。
- 将来的には作業管理システムと組み合わせることで、収穫可能な果実数から作業に必要な時間・作業人員数を予測し、適切に作業計画を立てられる。労働時間の平準化や短縮に資することが期待される。
具体的データ
その他
- 予算区分:交付金、委託プロ(人工知能)
- 研究期間:2017~2019年度
- 研究担当者:内藤裕貴、太田智彦、村松幸成、東出忠桐、深津時広、坪田将吾、山田哲資
- 発表論文等:
- 内藤ら、特願(2019年4月23日)