小型歩行用トラクタのハンドルに加わる力による後退時挟まれの検出方法
要約
ループハンドル式小型歩行用トラクタにおけるハンドルに加わる力による後退時挟まれの検出方法である。本検出方法を活用することにより、ハンドルに加わる力から後退時の挟まれを確実に検出し、挟まれ事故リスクを低減する安全装置を構成することが可能となる。
- キーワード:歩行用トラクタ、挟まれ事故、農作業事故、安全装置
- 担当:農業技術革新工学研究センター・安全工学研究領域・労働衛生ユニット
- 代表連絡先:
- 分類:研究成果情報
背景・ねらい
歩行用トラクタによる後退時の挟まれ死亡事故は年間約15件発生しており、歩行用トラクタによる死亡事故の約半数に相当する。この挟まれ事故の対策として、デッドマン式クラッチや緊急停止装置等の安全装置が開発・普及している。これらの安全装置は挟まれ事故に対して一定の効果を発揮していると考えられるが、これらを装備した機体による挟まれ死亡事故事例が報告されており、より安全性能の向上が急務となっている。また、今後開発される安全装置には、後退時の挟まれ時にのみ確実に作動する機能を持たせる必要がある。そこで、本研究では販売台数の多いループハンドル式小型歩行用トラクタを対象とし、ハンドルに加わる力(以下、ハンドル負荷)に着目することで、後退時挟まれを確実に検出する方法を明らかにする。
成果の内容・特徴
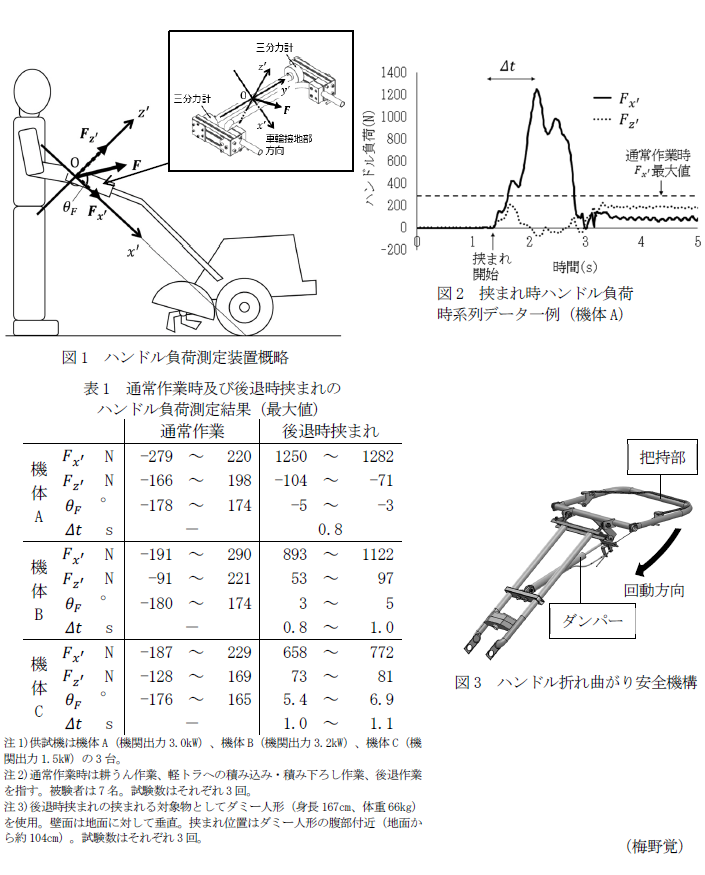
- ハンドル負荷により後退時の挟まれを確実に検出する方法である。今回調査した範囲内では、通常作業時の最大負荷は300N未満、後退時挟まれの最大負荷は600N以上であり、後退時挟まれの最大負荷は通常作業時と比較して200%以上であるため、ハンドル中央部から車輪接地部に向けた方向の後退時挟まれの最大負荷を計測することで後退時の挟まれが検出可能である(図1、図2、表1)。
- 後退時挟まれのハンドル負荷Fと車輪接地部方向とのなす角θF(機体右側面から見て反時計回りに正)は-5°以上7°以下であり、ハンドル負荷の方向はおおむね車輪接地部方向である。また、挟まれが開始してから最大値まで達する時間 Δtは約1秒である(図1、図2、表1)。
- 上記検出方法を活用したループハンドル式歩行用トラクタの挟まれ時の安全装置の要件として、a)ハンドル中央部から車輪接地部に向けた方向のハンドル負荷が300N未満の場合作動しないこと、b)上記方向のハンドル負荷が300Nを超え次第即座に作動すること、c)作動後の上記方向の残留ハンドル負荷が、作業者が人力で脱出可能な負荷となることが必要となる。この要件を満たす機構の例として、負荷によりハンドルが折れ曲がる機構や荷重センサでの検出により挟まれを除去する機構等が挙げられる(図3)。
成果の活用面・留意点
- 本検出方法は、今回調査した機関出力1.5~3.2kWの範囲内のループハンドル式歩行用トラクタのみを対象としている。
- 本検出方法は、ハンドルの接触部位として腹部または胸部を想定している。
- 本検出方法を参考に安全装置を開発する場合、装置の閾値は対象機の諸元値や車輪とハンドルの位置関係等を考慮し設定する必要がある。
具体的データ
その他
- 予算区分:交付金
- 研究期間:2018~2020年度
- 研究担当者:梅野覚、冨田宗樹、菊池豊、田中正浩、原田一郎、松本将大、塚本茂善
- 発表論文等:
- Umeno S. et al. (2021) Journal of JSAM 83(2): 125~126
- 冨田ら、特願(2021年2月19日)
- 梅野ら、特願(2021年2月25日)
- 梅野ら、特願(2021年2月25日)