水草刈機のための用水路での簡易な自律航行方法
要約
用水路で水草等の刈り取りのために別途開発中のラジコン式水草刈機の航行を、簡易に自動化してラジコン操作の負担軽減を図る。本自律航行方法では、水草刈機が上流から下流に向けて水流によって流下する際に、用水路の水路壁を基準に操舵して、ジクザグに航行させる。
- キーワード:水草、刈り取り、用水路、自律航行、自動化
- 担当:農村工学研究部門・水利工学研究領域・水域環境ユニット
- 代表連絡先:
- 分類:研究成果情報
背景・ねらい
近年、農業用用水路において水草や藻類(以下、水草等)の繁茂で、刈り取り除去の労力や除塵機への負担が増加している。 一方で、農村地域の過疎化・高齢化の進行に伴い、水路での水草等の刈り取り除去作業の労務負荷の軽減が強く求められている。特に他分野での自動化・ロボット化技術の発展を受けて、用水路を対象とした水草刈りロボットの開発が要望されている。しかし、用水路の水草等の刈り取り除去は、これまで民間企業においても研究開発実績がない。このため一足飛びにロボット化は困難であり、ラジコン操作で水草等を刈り取れる機材(以下、水草刈機)の開発を行っている。
本研究では、水草刈機のラジコン操作の支援となる用水路での簡易な自律航行方法の開発を行う。
成果の内容・特徴
- 水草を刈る際、まず水草刈機は上流から下流に移動しながら、刈刃を水路の横断方向になるべく広い範囲を移動させて、大きな面積を粗く刈り取る。刈刃を左右に振るラジコン操作は、単調な操作の繰り返しとなる。このため、自律でジグザグ航行させることで刈刃を左右に振り、ラジコン操作の負担を軽減する。
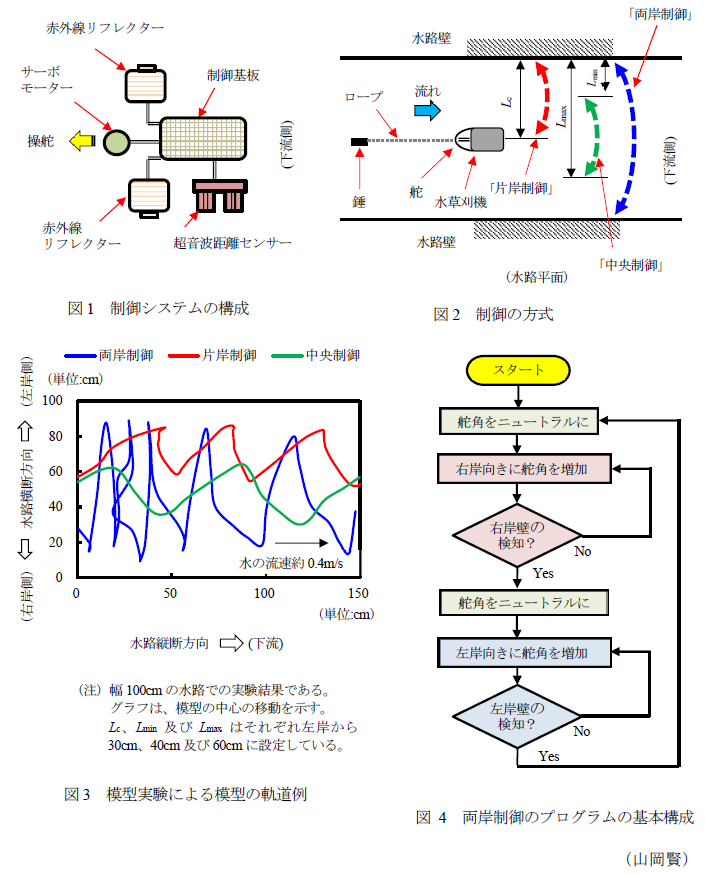
- 簡易な自律航行方法を行う制御システムは、水路壁を検知するための赤外線リフレクター、水路壁との距離を測定する超音波距離センサー、制御基板、操舵を行うサーボモーターによって構成される(図1)。なお、本方法では、航行のための動力源は持たず、水草刈機は用水路の水流によって流下する際に操舵によってジクザグに航行する。流下の際、水草刈機は、錘を引っ張ることで、流下速度の低減をはかり、スピンを防止する(図2)。
- 制御方法は、左岸から右岸の範囲をジクザグ航行させる「両岸制御」、一方の岸から対岸に至らない範囲でジクザグ航行させる「片岸制御」及び左右いずれの岸にも至らない範囲でジクザグ航行させる「中央制御」の3方式がある(図2及び図3)。
- 両岸制御では、水草刈機の左右に取り付けた赤外線リフレクターで水路壁との接触を検知して、操舵を行う。両岸制御のプログラムの基本構成は図4のとおりである。片岸制御では、水路壁との接触を検知すること又は超音波距離センサーによる水路壁からの距離が設定値(Lc)を超えることで、舵をそれまでと逆側に切る。中央制御は、超音波距離センサーによる水路壁からの距離が設定値(Lmin)以下となること又は超音波距離センサーによる水路壁からの距離が設定値(Lmax)以上となることによって、舵をそれまでと逆側に切る。
- 制御にはタイマー制御を組み込み、水路壁との接触の検知等でミスが生じても、前回の舵の向きの変更から設定時間が経過すると、舵の向きを切換えてジクザグ航行が継続される。
成果の活用面・留意点
- 本自律航行方法は模型実験で検証しているが、水草刈機の実機に搭載にあたっては調整が必要と考えられる。
- 水路壁との接触の検知に、赤外線リフレクターとともに接触センサーの利用が考えられる。
- 本自律航行方法は水草刈機に限らず、モニタリング作業等を行う機材を用水路内で航行させる際にも適用が可能である。
- 用水路内を設定したルートで航行させるような制御はできない。
具体的データ
その他
- 予算区分:交付金、その他外部資金(受託試験)
- 研究期間:2018~2020年度
- 研究担当者:山岡賢、嶺田拓也、吉永育生、渡部恵司、竹村武士、濱田康治
- 発表論文等:
- 山岡ら「水中作業具及び水中作業システム」特開2020-74760(2020年5月21日)
- 山岡ら(2020)農業農村工学会論文集、311:I_323-I_331