施設園芸用栽培ベッドを接触検出して自動直進する小型電動台車走行システム
要約
薬剤散布や運搬作業を省力化するために、栽培ベッドのフレームをローラで接触しながら検出し、栽培ベッドに沿って自動で直進する小型電動台車走行システムである。薬剤散布ノズルや荷台を装着し、無人で作業を行うことができる。
- キーワード:施設園芸、省力化、自動走行、薬剤散布、運搬
- 担当:野菜花き研究部門・野菜生産システム研究領域・生産工学ユニット
- 代表連絡先:電話029-838-8681
- 分類:研究成果情報
背景・ねらい
トマトなどの施設園芸生産では、薬剤散布、運搬作業を手作業で行うことが多い。大規模ハウスではレールを用いた走行システムが導入され、操舵の必要のない自動で走行する防除機や作業台車が利用され、省力化が図られている。一方、傾斜地や、小規模でレール導入の初期投資を避ける生産者のハウスでは自動走行できる防除機や作業台車を利用することができない状況である。そこで、レールが導入されていないハウス栽培の省力化のために、栽培ベッドをローラで接触して検出する、自動走行が可能なシステムを開発する。
成果の内容・特徴
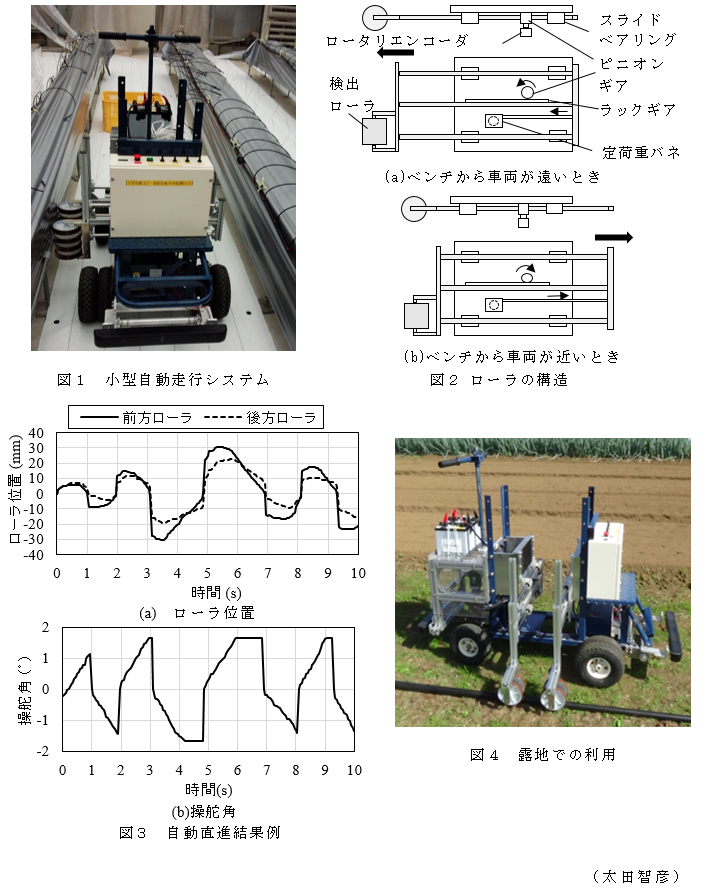
- 開発したシステムは、園芸用施設内を自動で走行する2輪駆動4輪式の電動台車であり、検出ローラ、操舵モータ、コントローラなどからなる(図1)。
- 車両から栽培ベッドまでの距離は、まずベッド方向にスライド動作可能な2個の検出ローラを定荷重バネにより一定の力で押し付け、得られるローラスライド量をラック・ピニオンギアを介してロータリエンコーダで電気的信号に変換して検出する(図2)。
- 車両の操舵は、DCモータで、操舵軸(ハンドルの軸)を左右に回転させることにより、操舵する。ロータリエンコーダの出力に基づき、操舵モータの回転角度、回転時間を制御して、自動直進する。
- 開発車両が自動走行できる栽培ベンチは、ベンチの垂直方向フレームを水平方向フレームの内側に取り付けた構造であり、検出ローラが接触しながら進行中に衝突するような突起はない。
- 走行開始地点の左右タイヤ間の中心での地面高さを0cmと設定し、走行速度が0.35m/s、ハウス内通路の路面凹凸が-3~21cmのとき、自動直進の精度は±30mm程度以下であり、手動操舵と同程度か、手動操舵より直進精度が高い(図3)。
- 開発車両は、側方のフレームを検出するローラを下向きのプラスチックホースを検出し、自動直進するためのローラに交換可能である(図4)。プラスチックホースをガイドとして走行速度0.35m/sで自動走行するとき、ほ場凹凸-19~6cmの屋外ほ場では、ハウス内と同様に、自動直進精度は±30mm以下である。
成果の活用面・留意点
- 手動操舵も可能であり、通常の電動台車として利用することも可能である。
- 薬剤散布ノズルや荷台を装着することで薬剤の自動散布、自動搬送が可能である。
- 大型ハウスの中央通路などの舗装路面も自動直進可能である。
- 自動回行は不可能であるため、手動による切り返しや回行を行い、走行通路を変更する必要がある。
- より高精度な自動直進のためにはさらに高度な制御が必要である。
具体的データ
その他
- 予算区分:交付金、その他外部資金(地域再生)
- 研究期間:2014~2017年度
- 研究担当者:太田智彦、岩崎泰永、中野明正、吉永慶太、深津時広、内藤裕貴、東出忠桐
- 発表論文等:太田ら「農業用車両および車両制御方法」特願2016-113633(2016年6月7日)