無人航空機空撮画像とSfMによる高精度草高推定のための空撮条件
要約
作物草高の省力的評価法への応用に期待される三次元解析UAV-SfMにおいて、高精度座標情報が得られる相対測位RTKを利用し、撮影角度を水平方向から-60°に傾けた空撮画像を用いることによって、地上基準点を利用せずに高精度な草高推定結果を得ることができる。
- キーワード : 育種効率化、Structure from Motion(SfM)、ドローン、無人航空機(UAV)
- 担当 : 北海道農業研究センター・寒地酪農研究領域・自給飼料生産グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
作物の研究現場では省力的な形質評価法の開発が求められている。無人航空機(UAV)で得られる多視点空撮画像を対象とし、Structure from Motion(SfM、多視点画像からの3 次元形状復元)で3次元点群を構築するリモートセンシング(UAV-SfM)は、草高の有用な推定方法として期待されている。高精度で3次元点群を得るためには緯度、経度、標高情報が明らかである地上基準点(Ground Control Point,以後GCP)が必要とされるが、GCP 設置が難しい場合があり、測位と維持管理にも労力を要する。さらに、SfM 実行時のGCP 情報付与の労力も問題となる。また、SfM においては中心部が高いモデルが構築される「ドーミング(doming)」、逆の「ディッシング(dishing)」と呼ばれる歪みが誤差の原因となる。
本研究においては水稲をモデル植物として、GCPを不要とするために数cmの誤差レベルで高い緯度、経度の情報を取得できるReal Time Kinematic(RTK、単独測位のGPSよりも精度の高い相対測位)システムを利用し、SfMによる歪みを低減させる空撮条件を明らかにし、作物草高推定を高精度化することを目的とする。
成果の内容・特徴
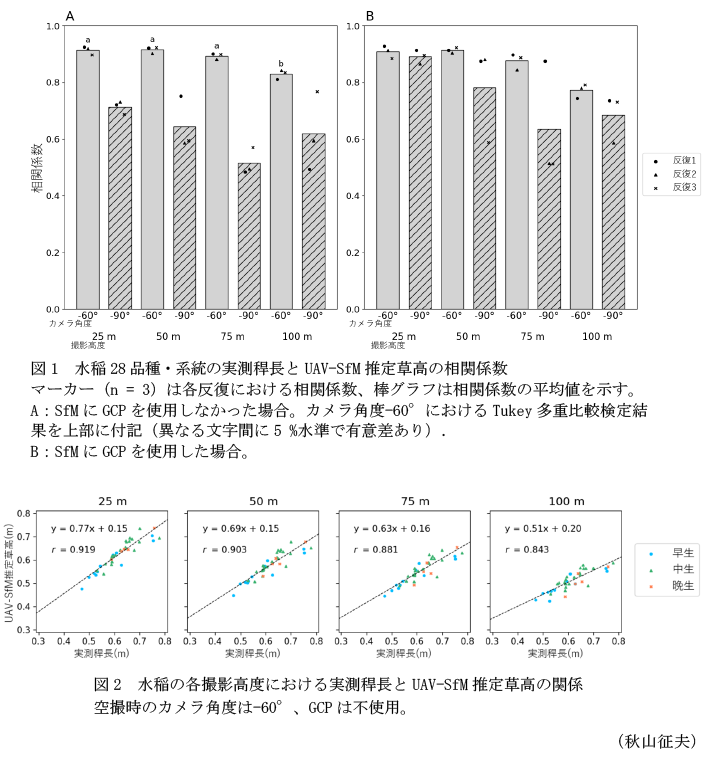
- RTK搭載ドローンによりカメラ角度-60°(水平を0°、上、下向きはそれぞれ正、負の値)で空撮してRTK座標情報を付加した画像を用いた場合、約50 m× 4.7 m の水田圃場における水稲28品種・系統の実測稈長とGCP不使用のUAV-SfM(Agisoft Metashape Professional 1.6.3で解析)による推定草高(圃場周囲の平均標高情報から差分して算出)には高い相関がある(図1A)。また、カメラ角度-60°ではSfMによる歪みが抑制される。
- カメラ角度-90°ではGCP情報の付加によって実測稈長と推定草高との間に高い相関が得られるが、カメラ角度-60°と比べて相関の強さは劣り、推定反復間のバラツキも大きい(図1B)。
- 高度25、50、75 m(各地上解像度:6.85,13.71,20.56 mm/pixel)の空撮画像からUAV-SfMで推定される草高と実測稈長間では相関係数に有意差はないが、100 m(地上解像度:27.41 mm/pixel)とは有意差がある(図1A)。空撮高度が高くなると、回帰直線の傾きが緩やかになり、草高が低く推定される傾向がある(図2)。
- 水稲品種の早晩性は推定精度に影響しない(図2)。
成果の活用面・留意点
- 空撮高度25 m以下では、実測値により近い回帰直線が得られることが予想されるが、画像解像度が高くなるほど、わずかな風の揺れによる植物体の位置ズレが影響して写真のアライメントができずにUAV-SfMが成功しない可能性も高くなる。
- 強風の際に空撮された画像セットを用いる場合、高高度空撮画像セットにおいてもUAV-SfMで大きな歪みが生じ、実物と異なる三次元点群が作成されることがある。
具体的データ
その他
- 予算区分 : 交付金
- 研究期間 : 2019~2021年度
- 研究担当者 : 秋山征夫、藤原崚、保田浩、齋藤正博、黄川田智洋、松葉修一、杉浦綾、眞田康治
- 発表論文等 : 藤原ら(2022) 育種学研究、24:12-21