無人航空機空撮画像とSfMによる作物草高推定の効率化と高精度化
要約
三次元解析において、カメラ角度-60°で空撮し、数値表層モデルから圃場周囲の座標情報で作成される地表面モデルを差分して得られる新規植物高モデルを利用することによって、作物草高推定の効率化と高精度化が可能となる。
- キーワード : 育種効率化、Structure from Motion(SfM)、ドローン、無人航空機(UAV)
- 担当 : 北海道農業研究センター・寒地酪農研究領域・自給飼料生産グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
作物の研究現場では省力的な形質評価法の開発が求められている。無人航空機(UAV)で得られる多視点空撮画像を対象とし、Structure from Motion(SfM)で3次元点群を構築するリモートセンシング(UAV-SfM)は、有用な草高の推定方法として期待されている。高精度で3次元点群を得るためには緯度、経度、標高情報が明らかである地上基準点(Ground Control Point,以後GCP)が必要とされるが、GCP 設置が難しい場合があり、測位と維持管理にも労力を要する。さらに、SfM 実行時のGCP 情報付与の労力も問題となる。また、SfM においては中心部が高いモデルが構築される「ドーミング(doming)」、逆の「ディッシング(dishing)」と呼ばれる歪みが誤差の原因となる。
UAV-SfMでの草高算出には、基点となる地面の標高情報が必要であるが、1)栽培前の圃場に対するUAV-SfMで地表面モデル(Digital Terrain Model:DTM)を得る方法、2)対象作物周辺の地表面情報を利用する方法、3)圃場周囲の平均標高情報を使用する方法がある。方法1)は栽培前の空撮が必要、方法2)は作物で地表面が覆われた場合に利用できない、方法3)は地表面が水平である水田などに限られる、などのデメリットがある。本研究においては飼料用トウモロコシをモデル植物として、測定対象の周囲の座標情報を用いて圃場内のDTM を作成できる新規手法の開発を行い、傾斜地におけるUAV-SfMの作物草高推定の効率化と高精度化を目的とする。
成果の内容・特徴
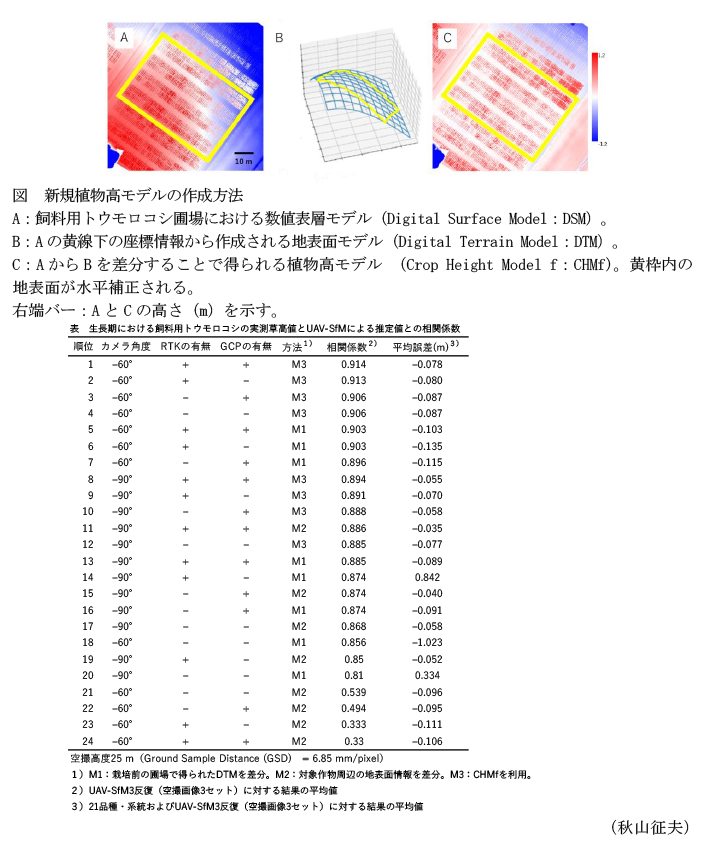
- UAV-SfM(Agisoft Metashape Professional 1.7.3利用)によって傾斜のある飼料用トウモロコシ圃場(52×40.5 m)で作成される数値表層モデル(Digital Surface Model:DSM)から、解析対象試験区周囲の座標情報から作成されるDTMを差分する新規植物高モデル (Crop Height Model f:CHMf)では、地表面が水平に補正される(図)。
- 21品種・系統を栽培している飼料用トウモロコシ圃場の生育期(2021/6/3、平均草高=0.90 m)においてUAV-SfMを3反復実施した場合、RTK搭載ドローンにより空撮高度25 m、カメラ角度-60°(水平を0°、上、下向きはそれぞれ正、負の値)、RTK情報付与、GCP座標情報を付与した条件のSfM-UAVで得られるCHMfの推定草高は、実測値との相関が非常に高い(表)。GCP座標情報を付与しない同条件でも同様の相関係数が得られ、さらに、RTK、GCP両者の情報を利用しない条件においても高い相関係数を示す。
- 飼料用トウモロコシの草高伸長が止まるステージ(2021/9/3、平均草高=2.68 m)についても、CHMfの利用によって同様に草高の実測値と推定値に高い相関が得られる。
- UAV -SfMのほとんどの条件で、実測草高値よりも低く草高が推定される(表)。
成果の活用面・留意点
- 本研究成果は飼料用トウモロコシ以外の作物にも応用できる。
- 2022年現在、RTKを搭載している国産汎用ドローンは販売されていないが、本研究成果によってRTK非搭載のドローンでもGCPを利用せずに作物草高推定の効率化と高精度化が可能となる。
具体的データ
その他
- 予算区分 : 交付金
- 研究期間 : 2019~2022年度
- 研究担当者 : 秋山征夫、藤原崚、黄川田智洋、佐藤尚
- 発表論文等 :
- Fujiwara et al. (2022) Front. Plant Sci. 13:886804
- 藤原、秋山「情報処理装置、情報処理方法、およびプログラム」特開2023-025576 (2023年2月22日)
- 藤原、秋山(2022)職務作成プログラム「圃場空撮画像から得られるオルソモザイクおよびDEMの解析プログラム」、機構-K34