無人航空機画像の多視点画像3次元形状復元(SfM)による植物高推定に適した日照条件
要約
作物草高の省力的評価法である無人航空機の多視点画像3次元形状復元(UAV-SfM)の正確度の向上には、太陽光の直射がない曇天条件下で空撮された高精度座標情報を有する画像の利用が有効である。
- キーワード : Real Time Kinematic-Global Navigation Satellite System (RTK-GNSS)、Structure from Motion(SfM)、無人航空機(UAV)
- 担当 : 北海道農業研究センター・寒地畑作研究領域・環境病害虫グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
植物高の測定は、作物の栽培管理を最適化するための生育モニタリングをする上で重要であるが多大な労力を要する。無人航空機(UAV)で得られる多視点空撮画像を対象とし、Structure from Motion(SfM、多視点画像からの3 次元形状復元)で3次元点群を構築するリモートセンシング(UAV-SfM)は、植物高の省力的な推定方法として開発が進められている。また、UAV-SfMを使った植物高推定の高精度化および省力化にあたり、全地球航法衛星システムの相対測位(Real Time Kinematic Global Navigation Satellite System、以後RTK-GNSS)で取得できる数cmの誤差レベルの位置情報の活用が期待されている。しかし、RTK-GNSS を用いたUAV-SfMにおける誤差検証は少数のデータに基づいた報告のみが行われている。他方、UAV-SfMのための画像取得時の天候については、晴天下、曇天下のいずれが高精度UAV-SfMに適しているか明らかではない。
本研究は試験圃場にて2年間定期的にUAV-SfMを繰り返し多数のデータを取得し、座標情報が明らかな検証点の実測値と推定値を比較し、鉛直絶対誤差が小さく(高正確度)、鉛直誤差の標準偏差が小さくなる(高精度)日照条件を明らかにし、植物高推定を高精度化することを目的とする。
成果の内容・特徴
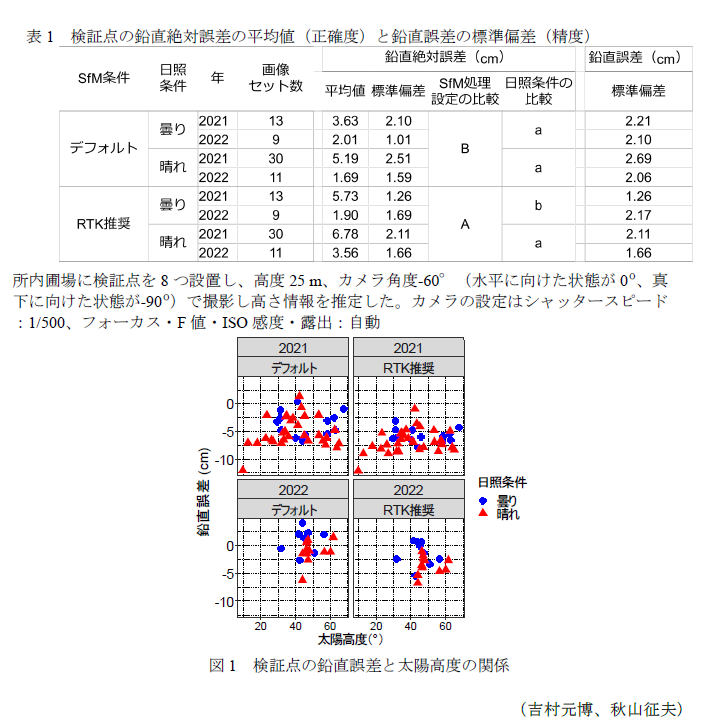
- RTK-GNSS搭載UAVで定期的に空撮を繰り返して取得された画像セットからSfMソフトウェア(Agisoft Metashape Professional 1.8.1)でデフォルトの設定(以後デフォルト)と、RTK-GNSS情報が付与された画像セットに適した設定(以後RTK推奨)で3次元モデルを構築した場合、検証点の鉛直絶対誤差の2年間の平均値はRTK推奨で5.3 cm、デフォルトで3.8 cmでありRTK推奨での正確度が低いが、RTK推奨の鉛直誤差の標準偏差は年次と日照条件によって1.26-2.17 cmでありデフォルトの場合の2.06-2.69 cmに比べて精度が高い(表1)。
- 日照条件について、画像セット内の全てもしくは一部の画像に太陽光の直射が見られた場合を「晴れ」、画像セット内の全ての画像に太陽光の直射が見られない場合を「曇り」とすると、検証点の鉛直絶対誤差の2年間の平均値はRTK推奨の場合に限り「曇り」のときに4.2 cm、「晴れ」のときに5.9 cmで有意差があり、「曇り」での正確度が高い(表1)。
- 年次別の検証点の鉛直誤差は2022年で有意に正確度が高く、「晴れ」で他の撮影日に比べて撮影時刻が遅く太陽高度が9.4°と極端に小さい2021年の年間通算日263日に空撮された画像セットは、鉛直誤差が最も0から離れており正確度が低い(図1)。
- 検証点の水平誤差の2年間の平均値はRTK推奨でデフォルトよりも有意に小さく標準偏差も小さいが、日照条件の影響は有意ではない(データ省略)。
成果の活用面・留意点
- RTK-GNSS搭載UAVのSfMによる作物高推定をする場合の空撮画像を得る際に参考となる情報である。
- UAV-SfM空撮時の日照条件は曇天が望ましく、特に太陽高度が小さく(日が低く)影が長くなる条件での撮影は避けたほうが良い。
- 裸地状態と植生状態の高さ情報の差分から植物高を算出する場合、RTK-GNSSを利用しても5 cm程度の標準偏差が生じる。そのため測定対象の植物高が低い場合や、植物高の比較対象間の差が小さい場合はUAV-SfMでの植物高推定は適さないことに留意が必要である。
- 本成果のデータセットはペレニアルライグラス栽培圃場から取得したが、撮影条件による検証点の推定精度を比較したものであり、対象作物を限定するものではない。
具体的データ
その他
- 予算区分 : 交付金
- 研究期間 : 2021~2023年度
- 研究担当者 : 吉村元博、秋山征夫
- 発表論文等 : 吉村、 秋山 (2024) 日草誌、 70:73-77