気流を利用したイチゴ生長点近傍の省力観測技術
要約
風速6 m/s程度の下方気流がイチゴ株の中心付近に当たるよう、ドローン等で作物列上を移動しながら空撮することで、通常は葉の死角にある、葉の発生状況、若い葉の大きさ、異変や出蕾の有無などの生長点近傍の生体情報を省力的に観察・記録できる技術である。
- キーワード : 画像観測、イチゴ、生長点、気流、クアッドコプタ
- 担当 : 農業機械研究部門・無人化農作業研究領域・小型電動ロボット技術グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
作物の生育状態の診断には、多くの情報を非破壊に取得可能な画像計測の利用が有効である。しかし、イチゴの生育診断に重要な生長点近傍の、葉の発生状況、第1から第3葉までの若い葉の大きさ、異変や出蕾の有無などの生育状況は、繁茂した葉の死角となるため画像計測の適用が難しい。そこで、本研究では、気流を利用することにより、イチゴの生長点近傍を省力的に撮影可能な観測技術を開発する。
成果の内容・特徴
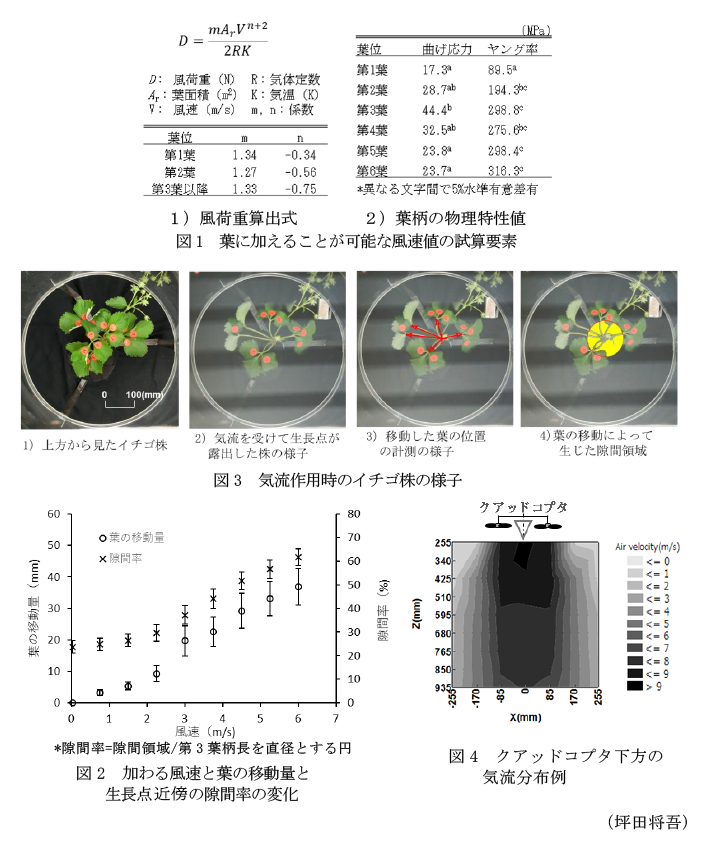
- 葉が上方から受ける風荷重の算出式や、葉柄のヤング率等の物理特性値を明らかにした(図1)。これらの物理特性値を用いてイチゴの葉面積、葉柄長、葉柄径、葉柄の着生角度に応じて、葉を損傷する風速を試算することが可能である。例えば、促成栽培イチゴの形状で試算すると、葉を損傷せずに加えることができる風速の上限は10 m/s程度である。
- イチゴの株に上方から加わる気流速と葉の動きの関係を調べた結果、風速4~6 m/s程度で葉が生長点から外側に30 mm程度動き、生長点近傍の露出空間(隙間率)が60 %程度まで増加する(図2)。
- これらの結果から、イチゴ株の上方から気流を加えながらカメラで撮影することで、株にダメージを与えずに通常は死角にある生長点近傍を露出させて、若い葉、発生直後の蕾などの生体情報を省力的に観測できる(図3)。
- 本技術は、風速10 m/s未満の下方気流を発する小型のドローンに一般的な、クアッドコプタを用いた観測に適用可能である。クアッドコプタの下方気流の分布は、機体中央下に集約しているため、株の直上を作物列に沿って移動観測することで多数の株の生長点を効率的に観測可能である。また、下方気流は距離におよそ比例して減衰することから、目的や上限に合わせて作物に加える風速を調整可能である(図4)。
成果の活用面・留意点
- 本技術は、生産者がほ場内の作物の生体情報を省力的に収集することを可能にし、収集した葉の発生状況、若い葉の大きさ、異変や出蕾の有無など情報は、環境制御、肥培管理、出荷・作業計画策定といった生産管理を効率化するための指標としての活用が想定される。
- 本技術は、これまでに取得が困難であった、多数の作物の生長点近傍の画像データを経時的に高頻度に収集することができるため、AIを用いた生育モデルの開発等に活用可能である。
- ドローンの下方気流をあらかじめ計測し、気流が加わる作物からの距離(飛行高度)を調整する必要がある。
具体的データ
その他
- 予算区分 : 交付金、文部科学省(科研費)
- 研究期間 : 2020~2021年度
- 研究担当者 : 坪田将吾、深津時広、太田智彦、内藤裕貴、山田哲資、難波和彦(岡山大)
- 発表論文等 :
- 坪田ら(2022)、農業食料工学会誌、84:229-237
- 坪田ら(2022)、農業食料工学会誌、84:321-331
- 坪田ら、「作物モニタリング装置及び作物モニタリング方法」特開2022-068003(2022年5月9日)