移動撮影画像を用いたイチゴ株の個体識別アルゴリズム
要約
作物列に沿って移動しながら撮影した連続画像において、前後の画像中での検出株数の違いから株を個体識別する画像処理アルゴリズムである。株ごとに個別のIDを付与して、その画像を記録できる。また、生育状態の推移を省力的に観察可能である。
- キーワード : 移動撮影、画像処理、株、個体識別、時系列比較、イチゴ
- 担当 : 農業機械研究部門・無人化農作業研究領域・小型電動ロボット技術グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
近年、屋外生産では、ドローンなどの空撮による広域画像から作物単体を個別に識別する技術が開発されてきた。一方、施設園芸では、生産効率化のために、植え付け位置による作物個体単位での生育のばらつきや、時系列での変化を把握することがより有効であるが、温室内では衛星測位情報の利用が困難なことや、撮影距離が限定されることから、既存技術を適用することができない。そこで本研究では、温室内のイチゴの作物列を近接撮影した画像をもとに、株を個体識別できる画像処理アルゴリズムを開発する。
成果の内容・特徴
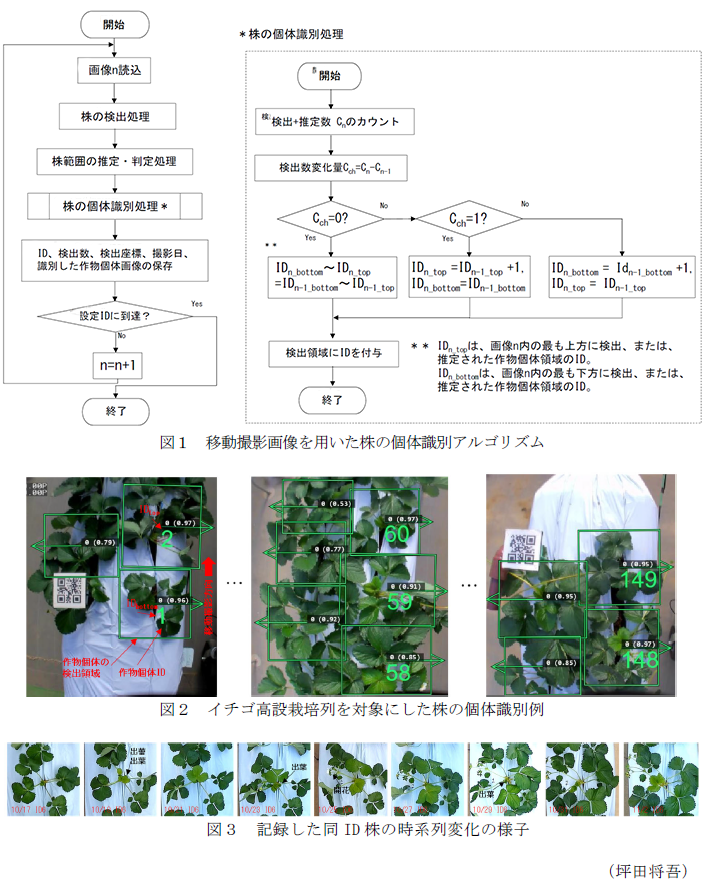
- 株の個体識別アルゴリズム(図1)は、カメラを備えたドローンなどの移動体が、作物列に沿って連続撮影した画像を使用する。その画像を順に読込み、画像中の株を検出、数をカウントし、前後の株数の違いから株を個体識別する。作物列内に定植した株数に至るまで本処理を繰り返すことで、列内の全ての株に固有のIDを付与した個体単位での画像を記録できる。
- 本アルゴリズムは、株間が概ね一定である場合、各処理画像中で少なくとも1株以上の株を正しく検出できれば、株間を基準にその上下や間に株があることを推定する機能や、株を正しく検出しなかったことを判定する機能を有する。また、特定の画像中に株を全く検出できない場合においても、前画像の個体ID、検出座標と移動速度から、画像中で検出されなかった株の範囲を推定する機能も有する。これにより、画像処理で株を安定して検出することが困難な場合においても株を推定により識別できる。
- ドローンの利用を想定した、気流を利用したイチゴ生長点近傍の観測技術(R4農研機構研究成果情報)と組み合わせ、高設栽培列の上方から近接観測した画像を用いて、株を個体識別した例を図2に示す。この観測を経時的に実施することで、図3に示すように株ごとの生育の変化を時系列で確認することが可能である。
成果の活用面・留意点
- 本技術により、生産者が、葉の発生頻度、出蕾日や草勢などの重要な生育情報を、植え付け位置ごとに時系列で省力的に確認することができる。
- 本技術を用いた観測により、多数の株の画像情報を省力的に収集することが可能となり、AIを用いた生育モデルの開発等への活用が期待できる。
- 本技術はイチゴに限らず列上に植え付けられる作物への展開が可能である。
- 本技術の適用には、品目や栽培環境に応じた株の検出技術を要するとともに、移動撮影する画像の取得間隔は株間長よりも短い必要がある。また、温室内全体の株の識別を行うためには、マーカーの設置などにより作物列を識別する必要がある。
具体的データ
その他
- 予算区分 : 交付金、文部科学省(科研費)
- 研究期間 : 2022~2023年度
- 研究担当者 : 坪田将吾、嘉瀬井祥太、深津時広、難波和彦(岡山大)
- 発表論文等 : 坪田、特願(2023年3月28日)