国際標準化されたロボット農機の安全性に関する検査の主要な実施方法と基準
要約
ロボット農機の安全性に関する国際規格であるISO18497:2024に、農研機構が開発・運用しているロボット・自動化農機検査の主要な実施方法と基準(ロボットトラクター用、ロボット田植機用)が附属文書として掲載されている。
- キーワード : ロボット農機、安全性、検査方法・基準、国際規格
- 担当 : 農業機械研究部門・安全検査部・安全評価グループ、システム安全工学研究領域・協調安全システムグループ
- 代表連絡先 :
- 分類 : 普及成果情報
背景・ねらい
国際的にも農業機械のロボット化は進展している中、日本では世界に先行して2018年からロボットトラクターの本格的な市販化が始まった。ロボット農機の普及のための重要な要素の一つが安全性の確保であり、農林水産省は2017年にリスクアセスメントの実施など安全性確保の原則等についての指針を示した「農業機械の自動走行に関する安全性確保ガイドライン」を策定した。また、安全対策の客観的かつ定量的な評価試験方法の必要性から、農研機構では2018年から世界に先駆けてロボット農機の安全性確認に主眼を置いた検査である「ロボット・自動化農機検査の主要な実施方法及び基準」を策定し、ロボットトラクター、ロボット田植機の安全性について公正、中立な立場から検査・認証を実施してきている。今後の国産ロボット農機の海外への普及を見据えて、ロボット農機の安全性を確認する試験の実施方法と基準の国際標準化を図ることにより、安全な国産ロボット農機の海外展開への貢献が期待される。
成果の内容・特徴
- ISO18497:2024は、「機械設計の原則と用語」、「障害物保護システムの設計原則」、「自動作業領域」、「検査方法と検査原則」の4つのパートから構成され、「検査方法と検査原則」の附属文書に農研機構が策定した「ロボット・自動化農機検査の主要な実施方法と基準(ロボットトラクター用、ロボット田植機用)」に基づいた試験実施方法と基準が掲載されている。
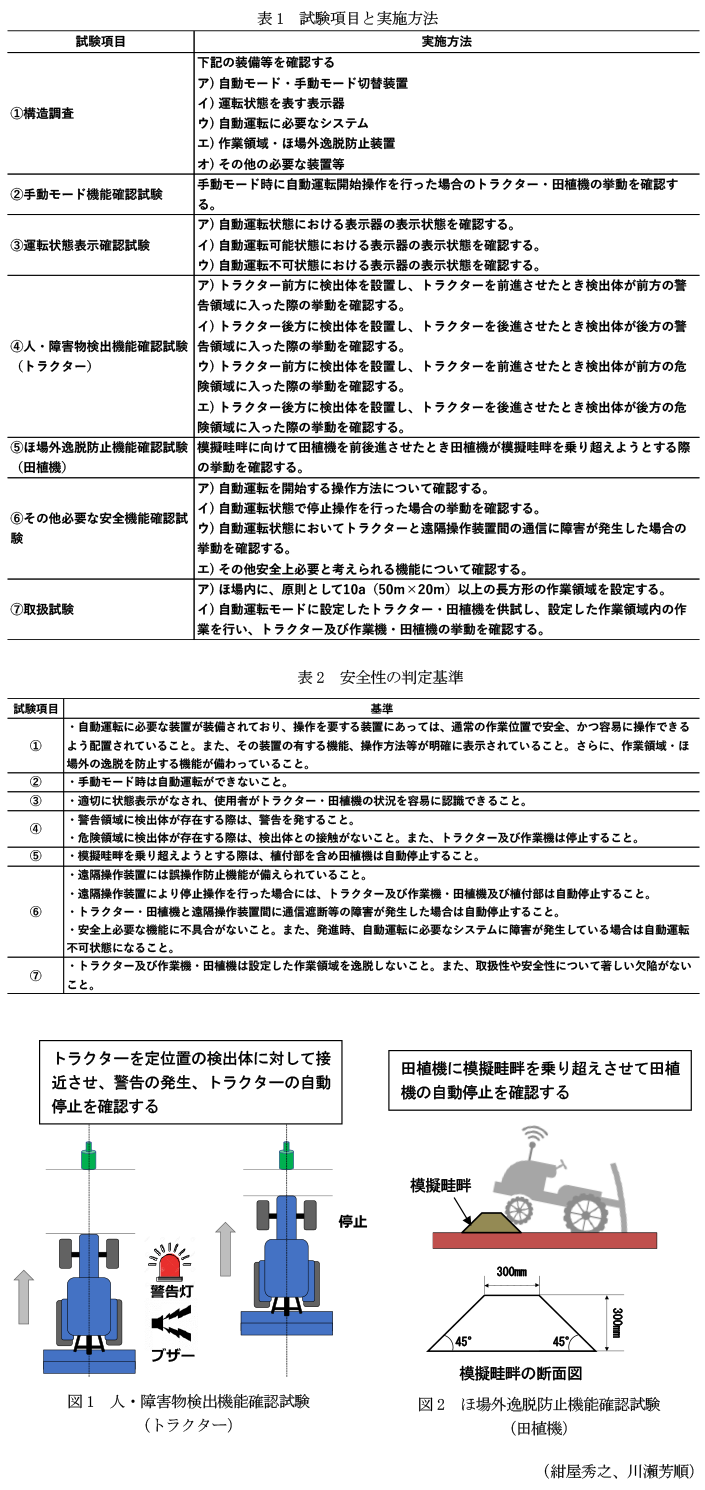
- 掲載された試験実施方法は、ロボットトラクター、ロボット田植機を対象としており、その項目は、①構造調査、②手動モード機能確認試験、③運転状態表示確認試験、④人・障害物検出機能確認試験(ロボットトラクター専用)、⑤ほ場外逸脱防止機能確認試験(ロボット田植機専用)、⑥その他必要な安全機能確認試験、⑦取扱試験から構成される(表1)。
- 各試験実施項目の具体的な内容は、①自動運転に必要な装備の確認、②自動運転を無効化したときの機械の状態の確認、③使用者が運転状態を認識するための表示器の視認性の確認、④自動運転中のロボットが接近する人や障害物を非接触で検出し、検出したことを周囲に警告する機能及びロボットの走行部を自動停止させる機能の確認(図1)、⑤畦畔を乗り超えたロボットのほ場外への逸脱を防止する機能の確認(図2)、⑥遠隔操作装置の取扱性及び通信に障害が発生した場合の安全機能等の確認、⑦作業領域の設定等を含む一連の自動運転作業における取扱性や安全性の確認、であり項目ごとに試験実施方法及び判定基準を定めている(表1、2)。
普及のための参考情報
- 普及対象 : 国内外の農業機械メーカー、検査機関及び認証機関。
- 普及予定地域・普及予定面積・普及台数等 : 国内外。
- その他 : 農業機械研究部門が2018年度より実施しているロボット・自動化農機検査においてこれまで、ロボットトラクター4型式、ロボット田植機4型式を認証した(2024年12月時点)。
具体的データ
その他
- 予算区分 : 交付金
- 研究期間 : 2021~2024年度
- 研究担当者 : 紺屋秀之、川瀨芳順、塚本茂善、山﨑裕文
- 発表論文等 :
- ISO18497-4:2024 Agricultural machinery and tractors - Safety of partially automated, semi-autonomous and autonomous machinery - Part 4: Verification methods and validation principles
- 農研機構(2021)「ロボット・自動化農機検査の主要な実施方法及び基準-ロボット農機(トラクター)用」(2021年4月1日)
- 農研機構(2020)「ロボット・自動化農機検査の主要な実施方法及び基準-ロボット農機(田植機)用」 (2021年4月1日)