ロボットコンバインの安全性に関する検査の主要な実施方法と基準
要約
ほ場内やほ場周辺にいる使用者が目視で監視することにより無人で収穫作業を行うコンバインに対応する安全性検査の主要な実施方法及び基準である。人・障害物検出試験の検出対象に国際規格準拠の人型検出体を新たに加えることで、AIカメラを搭載したロボットコンバインにも対応できる。
- キーワード : ロボット農機、コンバイン、人・障害物検出、安全性検査
- 担当 : 農業機械研究部門・安全検査部・安全評価グループ
- 代表連絡先 :
- 分類 : 普及成果情報
背景・ねらい
近年、使用者がほ場内やほ場周辺において目視にて監視を行いながら無人で収穫作業を行うロボットコンバインの開発が進められている。作業時には補助者等がコンバインの周辺にいる場合があるため、ロボットコンバインには、接近する人や障害物を検出し、衝突等の危険性に応じて周囲に警告し、自動停止させる等の機能が備えられているが、それらを客観的かつ定量的に評価する必要がある。そこで、ロボットコンバインの安全性確認に主眼を置いた評価試験方法を策定し、ロボット・自動化農機検査として実施することにより、安全なロボット農機の開発・普及に貢献する。
成果の内容・特徴
- 本検査の適用範囲は、使用者がほ場内やほ場周辺から監視しながら、ほ場内を無人で収穫作業させるロボットコンバインである。
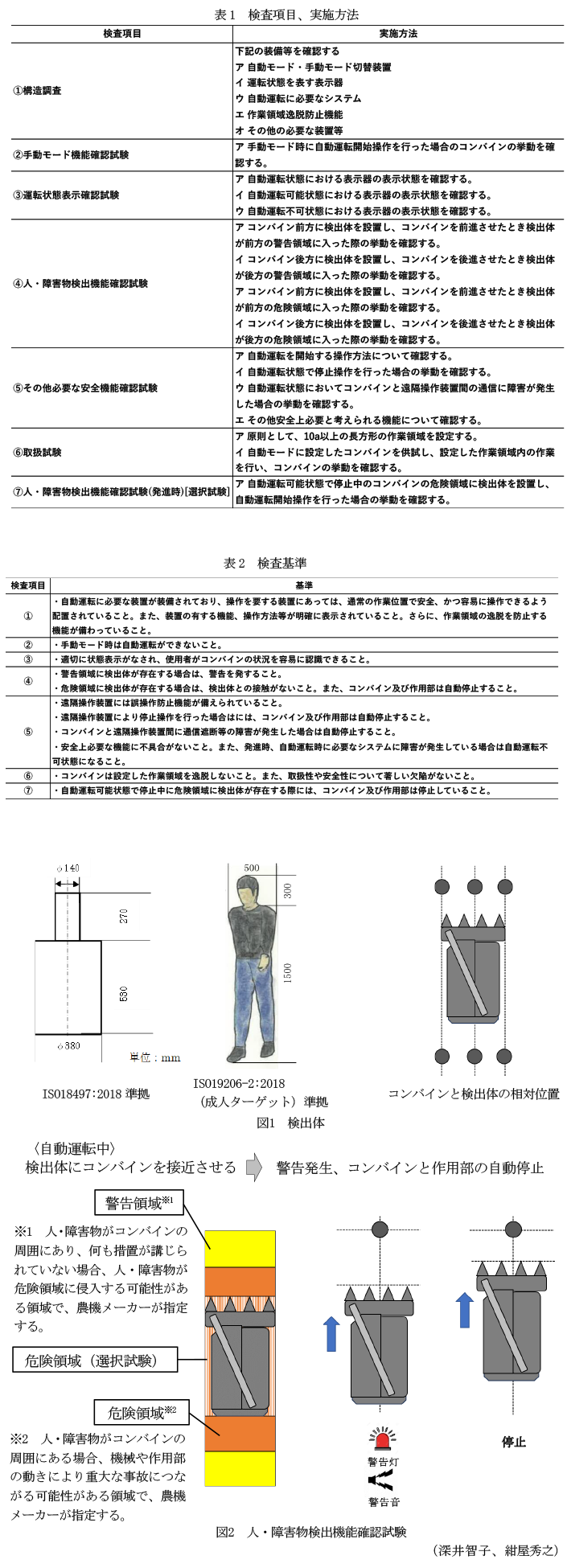
- 本検査の検査項目は、①構造調査、②手動モード機能確認試験、③運転状態表示機能確認試験、④人・障害物検出機能確認試験、⑤その他必要な安全機能確認試験、⑥取扱試験から構成される。各検査項目の具体的な内容は、①自動運転に必要な装備等の確認、②使用者が自動運転を無効化したときのコンバインの挙動を確認、③使用者が運転状態を認識するための表示器の視認性の確認、④コンバインが、自動運転中に接近する人や障害物を非接触で検出し、危険性に応じて周囲に警告する機能及び自動停止する機能の確認、⑤遠隔監視装置の取扱性、及び通信に障害が発生した場合のコンバインの挙動等の確認、⑥作業領域の設定等を含む自動運転に関するすべての操作や設定の難易や安全性の確認等であり、検査項目ごとに検査の実施方法及び基準を定めている(表1、2)。
- 人・障害物検出機能確認試験では、検出体としてISO18497:2018又はISO19206-2:2018(成人ターゲット)を使用し、コンバインの前方及び後方の車両中心線上、車両中心線と平行で依頼者が指定する刈取部の最も側方を通る直線上の地表に設置し、コンバインを自動運転で前又は後進させ、依頼者の指定する警告領域では警報の発出、同様に依頼者指定の危険領域では検出体と接触しないうちに走行及び作用部は自動停止することを求めている(図1、2)。
- 上記①~⑥の検査項目に加え、検査項目⑦人・障害物検出機能確認試験(発進時)を選択試験として設けている。自動運転が可能な状態で停車中のコンバインの危険領域に検出体を設置し、使用者が自動運転開始操作を行った際に、コンバインが自動運転を開始しないことを求めている。
普及のための参考情報
- 普及対象 : 農業機械メーカー。
- 普及予定地域・普及予定面積・普及台数等 : 全国。
- その他 : ロボット農機(コンバイン)の安全要件は、農業機械研究部門が2018年度より実施している安全性検査のうちロボット・自動化農機検査の主要な実施方法及び基準に導入された。ロボット農機検査の対象機種としては、農用トラクター(乗用型)、田植機、乾燥機(穀物循環型)の遠隔監視装置に次いで4機種目である。
具体的データ
その他
- 予算区分 : 交付金
- 研究期間 : 2021~2024年度
- 研究担当者 : 深井智子、紺屋秀之、原田泰弘、川瀨芳順、松本将大、小林慶彦、清水一史、志藤博克
- 発表論文等 : 農研機構(2024)「ロボット・自動化農機検査の主要な実施方法及び基準_ロボット農機(コンバイン)」(2024年8月1日)