農道における自動運転のためのロバストな自己位置推定技術
要約
トラクタや運搬車等の農用車両の農道における自動運転のためのロバストな自己位置推定技術である。GNSS、AIによる走行路認識、ポールをランドマークとして用いる方法など、複数の自己位置推定法を信頼度に基づいて統合することで、道路インフラが未整備の多様な農道環境に対応する。
- キーワード : 自動運転、自己位置推定、ほ場間移動、農道環境
- 担当 : 農業機械研究部門・知能化農機研究領域・国際標準・土地利用型作業グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
従来の農用車両の自動運転は、単一ほ場内での作業の自動化を前提とし、作業者が現場にとどまって車両の監視やほ場間の移動作業を行う必要があることから、一人で複数の自動運転農機を同時に運用することは実質的に困難で、生産性向上効果は限定的である。これに対し、自動化の次のステップの1つとしてほ場間移動を含む遠隔監視型の自動運転農機の研究開発が進められており、複数の自動運転農機を遠隔操作し、農道における自動運転によるほ場間移動と、複数ほ場での作業の自動化を実現することで、生産性が大きく向上することが期待されている。農道において自動運転を実現するには、多様に変化する周辺環境に対応するロバストな自己位置推定が不可欠だが、従来の自動運転農機が依存するGNSS(衛星測位)では、農道周辺の樹木などにより衛星からの信号が阻害され安定した測位が行えない場合がある。また、農道は未舗装など準自然的な環境のため、道路インフラを前提とする自動車用の自己位置推定技術では対処できない場面が多い。
そこで、本研究では、多様な農道環境に対応した自動運転を実現するため、農道環境に特化し、ロバストな自己位置推定技術を開発する。
成果の内容・特徴
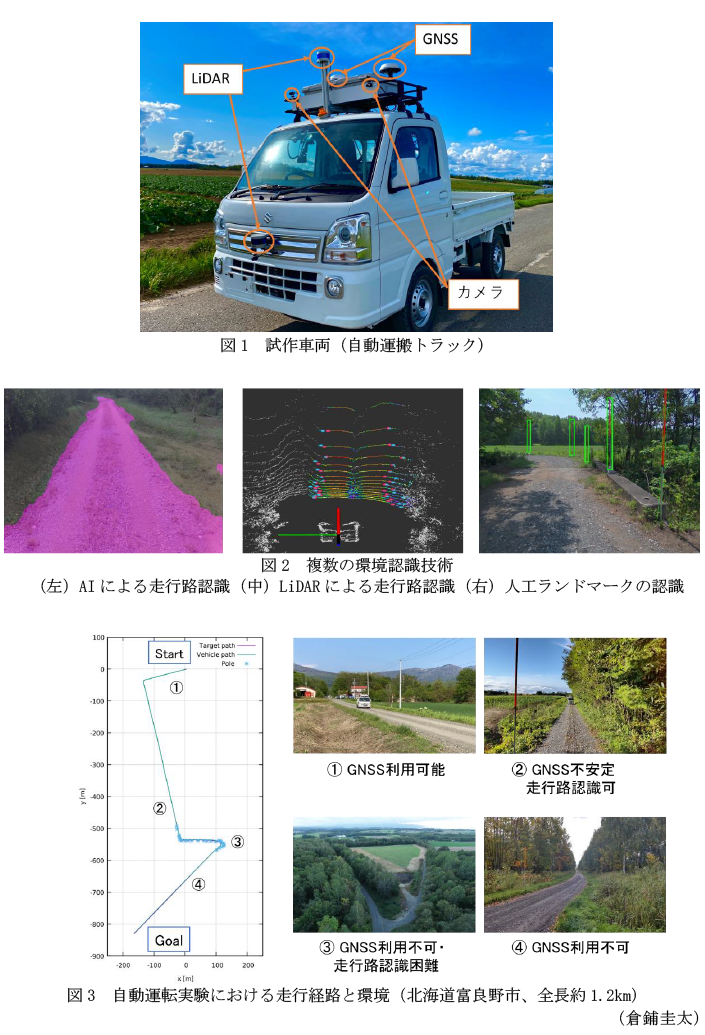
- 本研究で提案する自己位置推定技術では、GNSS、カメラ、LiDARなど自動車の自動運転でも使用されるセンサが用いられる(図1)。これらのセンサは、自動車の自動運転の社会実装に伴う低価格化が期待され、各センサの特性を生かしたセンサフュージョンによりロバスト性を確保する。
- 農道環境は、時刻や天候、季節により多様に変化する。そこで本提案技術ではGNSSに加えて、着眼点の異なる3つのアルゴリズムである「AIによる走行路認識」、「轍の検出による走行路認識」、「人工ランドマーク(ポール)を用いた自己位置推定」(図2)による処理を並列に用い、各処理の信頼度を評価し、自己位置の推定結果を重ね合わせることで環境の変化に対応したロバストな自己位置推定を行う。人工ランドマークは、コストの観点から設置しないことが望ましいが、悪条件が重なり困難度の高い環境での安全策として用いることができる。
- 本提案手法により、GNSSが安定して利用可能な環境、GNSSは不安定だが走行路認識が可能な環境、及びいずれも困難のため人工ランドマークを設置した環境を含み、前述の全てのアルゴリズムが必要となる農道(約1.2km)の自動走行が可能で(図3)、その際の横方向の経路誤差は直進部において約10cm、旋回部において約30cmである。
成果の活用面・留意点
- 複数の方法を統合するという基本設計のため、将来的により優れた手法が開発された際にも円滑に取り入れることが可能である。
- 関連研究において遠隔から車両の状態確認や走行指示を行うための監視システムの開発を進めており、本提案手法を含む総合的なシステム構築を進めている。
- 自動運転農機の公道走行は現状では認められておらず、実用化のためには法整備等が必要である。
具体的データ
その他
- 予算区分 : 交付金、復興庁(農林水産研究の推進事業)、SIP
- 研究期間 : 2022~2024年度
- 研究担当者 : 倉鋪圭太、深尾隆則(東大)、植月悠記(スズキ)
- 発表論文等 :
- Kurashiki K. et. al. (2022) CIGR2022, OS-20-02
- Kurashiki K. et. al. (2024) J. Robot. Mechatron. 36(6): 1516-1526
doi:10.20965/jrm.2024.p1516