ドローン空撮用マルチスペクトルカメラの違いによる水稲観測結果の影響評価
要約
機器の影響を受けずに安定した水稲の生育状況の把握を行うため、マルチスペクトルカメラの機種の違いや撮影条件の違いによる観測結果の変動を、シミュレーションを用いて評価する。評価結果をもとに空撮方法や補正方法を提案することが可能となる。
- キーワード : マルチスペクトルカメラ、リモートセンシング、シミュレーション、反射率、植生指数
- 担当 : 基盤技術研究本部・農業情報研究センター・AI研究推進室・画像認識ユニット
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
ドローンの普及に伴い、農業分野でも生育状況の把握等にドローンの空撮画像の利用が進んでいる。特に、近赤外やレッドエッジ領域が撮影可能なマルチスペクトルカメラは植物の状態の把握に適しており、実際の現場でも様々なアプリケーションが提供されている。しかし、現在複数のマルチスペクトルカメラが市販されており、カメラによって観測する波長域が異なるため観測結果に違いが生じる。さらに、屋外で使用するため、撮影時刻や天候が一定ではなく、これらの撮影条件に起因した違いも生じる。そのため、本研究では、ドローン空撮で安定的に生育状況を把握できる空撮条件を提案するために、機種の違いや撮影条件による観測結果の変動を定量的に把握する。
成果の内容・特徴
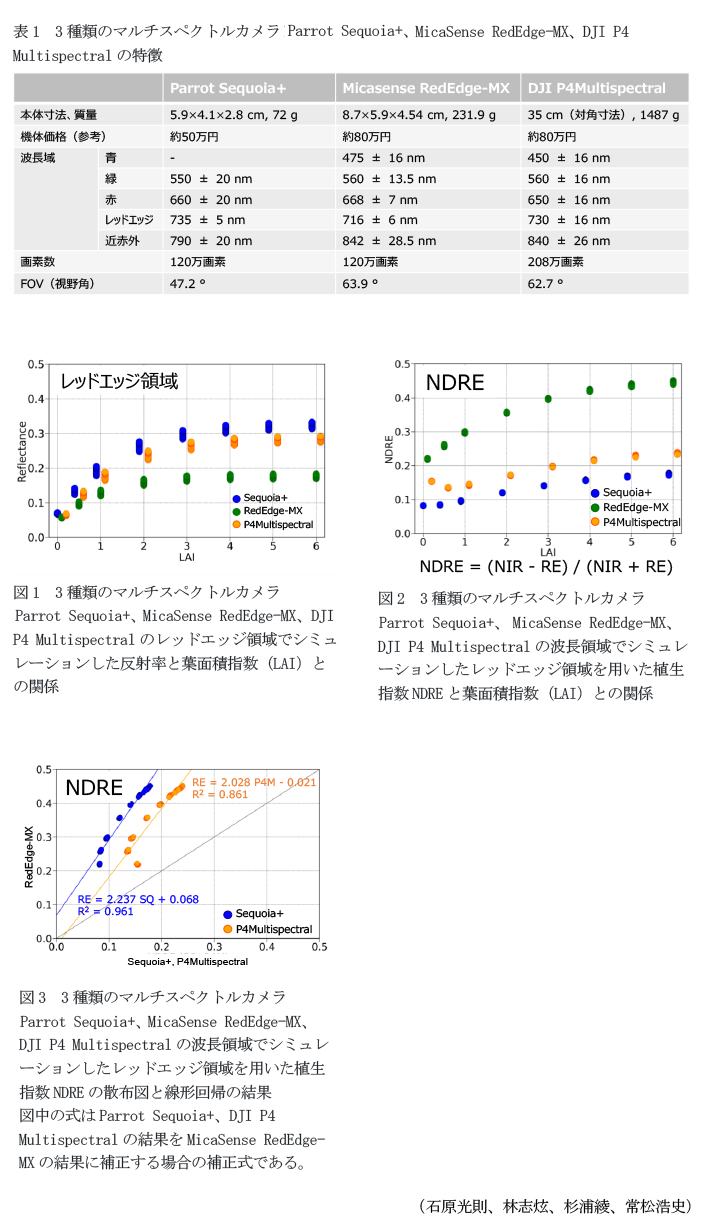
- 植物群落内放射伝達モデルであるPROSAILを用いて様々な観測条件での反射率をシミュレーションし、3種類のマルチスペクトルカメラ(Parrot社製のSEQUOIA+、MicaSense社製のRedEdge-MX、DJI社製のP4 Multispectral)の特徴を把握する(表1)。観測条件として、水稲の生育状況を表す葉面積指数(Leaf Area Index, LAI)、季節と時刻により変動する太陽天頂角、観測時の天候により変化する散乱光比を使用する。
- シミュレーションした反射率について3つの機種で比較した結果、使用している波長領域が異なることによる違いがあり、特にレッドエッジ領域で大きな違いがある(図1)。そのため、異なる機種でレッドエッジ領域を比較する場合はこれらの違いを考慮する必要がある。
- 反射率から算出した植生指数についても3つの機種間で違いが見られ、特にレッドエッジ領域を使用したNDREで大きな違いがある。反射率の場合と同様に異なる機種の植生指数の結果を比較する場合はこれらの違いを考慮する必要がある(図2)。
- 太陽天頂角や散乱光比の組み合わせが変わると反射率や植生指数が変化する。そのため、ドローン空撮は散乱光比が安定する曇天日や同じ太陽天頂角など撮影条件を合わせることで、これらの変化を低減させることができる。
- 3種類の機種間の植生指数の違いはシンプルな線形回帰によって補正できるため、これらの補正式を用いて同じ基準で比較することが可能となる(図3)。図3はParrot Sequoia+、DJI P4 Multispectralによる植生指数NDRE(横軸)をMicaSense RedEdge-MXのNDRE(縦軸)に補正する場合の例である。
成果の活用面・留意点
- 今回の結果はモデルによるシミュレーションであるため、実際の観測データの結果とは完全に一致しない可能性がある。
- 今回の手法は今後新たなマルチスペクトルカメラを導入する場合にも対応可能である。
具体的データ
その他
- 予算区分 : 交付金、文部科学省(科研費)
- 研究期間 : 2021~2022年度
- 研究担当者 : 石原光則、林志炫、杉浦綾、常松浩史
- 発表論文等 : 石原ら(2022)農業情報研究、31:65-77