実用性を向上させた漏水探査ロボットによる農業用パイプラインの漏水探査システム
要約
農業用パイプラインの漏水位置を推定する漏水探査ロボットに超音波発信器を搭載し、調査路線に複数のチェックポイントを設定する新たな漏水探査システムである。ロボットの位置をリアルタイムで把握でき、紛失リスクを低減するとともに、漏水位置の推定精度を向上することができる。
- キーワード : パイプライン、漏水、漏水探査ロボット、漏水位置検出、超音波
- 担当 : 農村工学研究部門・施設工学研究領域・施設保全グループ
- 代表連絡先 :
- 分類 : 普及成果情報
背景・ねらい
農業用パイプラインは、全国に約12,000km整備されているが、近年、老朽化などが原因で毎年約1,000件の漏水事故が発生している。そこで、パイプライン内部を水と一体で流下しながら管内音を取得し、漏水に伴って発生している噴出音により漏水位置を推定する漏水探査ロボット(以下、ロボット)を開発している。しかし、実運用にあたっては、調査中、ロボットの現在位置が分からないこと、ロボットの到着が目視確認できないこと、調査路線が長いほど漏水位置の推定幅が大きいこと、などの課題がある。本研究では、これらを改善するための新たな漏水探査システムを構築する。
成果の内容・特徴
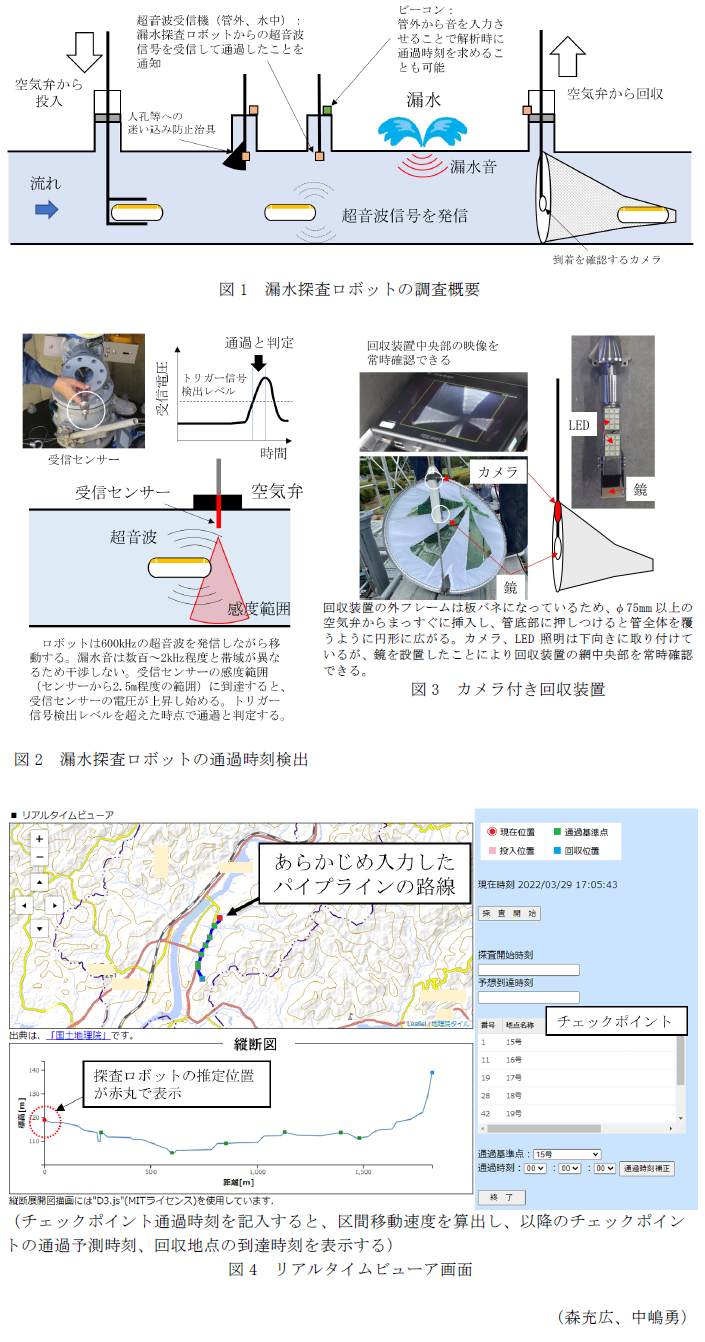
- ロボットによる調査概要を図1に示す。ロボットは、パイプライン内部を水と一体で流下し、管内音を記録する。ロボットを回収したのち、管内音から漏水音を抽出する。発射時刻と漏水音を記録した時刻との差に、調査区間の平均的な移動速度を乗じることにより、漏水位置を推定する。
- 新システムでは、ロボットに超音波(600kHz)発信器を追加している。調査路線内の空気弁など、管に直接アクセスできるポイントをチェックポイントとして設定し、ロボットが発信する超音波を受信するセンサーを取り付ける。これにより、ロボットがチェックポイントを通過したかどうかを判定できる(図2)。逆に、管外から周波数一定の音源を入力することで、解析時に通過時刻を検出することもできる。これまでの実験により、ロボットは流下延長距離の約5%の精度で漏水位置を推定できることが確認できている。調査路線に複数のチェックポイントを設けて流下延長距離を短い区間に細分化し、区間ごとのロボット移動速度を求めることにより、漏水位置の推定精度が向上する。
- 新システムでは、回収装置にLED照明と水中監視カメラを搭載している(図3)。ロボットが到着したことを目視確認でき、紛失リスクを大幅に低減できる。
- 新システムでは、ロボットの現在位置を作業者がWeb上で共有できる「リアルタイムビューア」機能を装備している。発射時刻と、チェックポイントの通過時刻を入力すると、その区間の移動速度を計算し、その移動速度をもとに、下流のチェックポイントの通過予測時刻や、回収地点の到達予測時刻、ロボットの現在位置(計算値)を地図上にリアルタイムで表示する(図4)。
普及のための参考情報
- 普及対象 : パイプラインの機能診断の実務を行うコンサルタント、調査会社。
- 普及予定地域・普及予定面積・普及台数等 : 調査区間の始点・終点にロボットを投入・回収できる空気弁(φ75mm以上)や開水路が存在するパイプラインやサイフォンで利用できる。
- その他 : 管路内流速は0.3~0.5m/sが最適である。農業用水をこの速度で通水する必要があるため、調査にあたっては、調査時期の選定や、制水弁の開度制御など管理者の協力が不可欠である。さらに、調査対象外路線に迷い込まないように、制水弁の操作なども必要である。
- リアルタイムビューアを利用するためには、調査区間の路線、距離、空気弁などの位置図などの詳細図面(三次元CADデータ等)があらかじめ必要である。
具体的データ
その他
- 予算区分 : 交付金、農林水産省(官民連携新技術研究開発事業)、民間資金等(資金提供型共同研究)
- 研究期間 : 2019~2022年度
- 研究担当者 : 森充広、中嶋勇、川邉翔平、金森拓也、高橋良次、金氏眞(東亜グラウト工業(株))、張満良(東亜グラウト工業(株))、柴博志(東亜グラウト工業(株))、西尾元樹(東亜グラウト工業(株))、日諸雄太(東亜グラウト工業(株))、荒木良二(東亜グラウト工業(株))、宮崎靖浩(東亜グラウト工業(株))、財部伸一((株)ウォールナット)、斎藤良二((株)ウォールナット)、高岩庸博((株)ウォールナット)、足利英昭(東亜グラウト工業(株))、大塚響(東亜グラウト工業(株))
- 発表論文等 :
- 森ら(2021)畑地農業、746:2-11
- 中嶋ら「漏洩検知方法及び漏洩検知装置」特開2019-152450(2019年9月12日)