SLAM搭載無人航空機による堤体形状把握と撮影画像解析システム
要約
SLAM搭載無人航空機を用いることにより、樹木等の影響を避けながら撮影対象への近接的な航行を実現し、解像度の高い画像を取得することができる。これより写真測量による3次元形状データ作成を簡易に行うことが可能となり、農業用貯水池の堤体の大規模災害時の点検等に活用できる。
- キーワード : 無人航空機(UAV)、SLAM、堤体、繰り返し診断、SfM(3次元形状計測)
- 担当 : 農村工学研究部門・施設工学研究領域・施設整備グループ
- 代表連絡先 :
- 分類 : 研究成果情報
背景・ねらい
農業用貯水池の堤体などの土構造物においてもドローンに代表される無人航空機を用いた診断技術の活用が期待されている。そこで無人航空機によって撮影された画像を平常時の安全監視や、大規模地震時の点検における数値的な情報として活用できるよう、立体的な形状情報に変換して表示することを目的としたシステムを構築する。特にSLAM(Simultaneous Localization and Mapping, 自己位置推定と周辺地図作成の同時実行)技術によって制御された無人航空機を用いて高精度な位置制御を行うことで再現性の高い繰り返し撮影と自動的な解析を実現し、平常時においては変状の有無の確認に、大規模災害時には変状を把握することによって点検作業などに活用することをねらいとする。
成果の内容・特徴
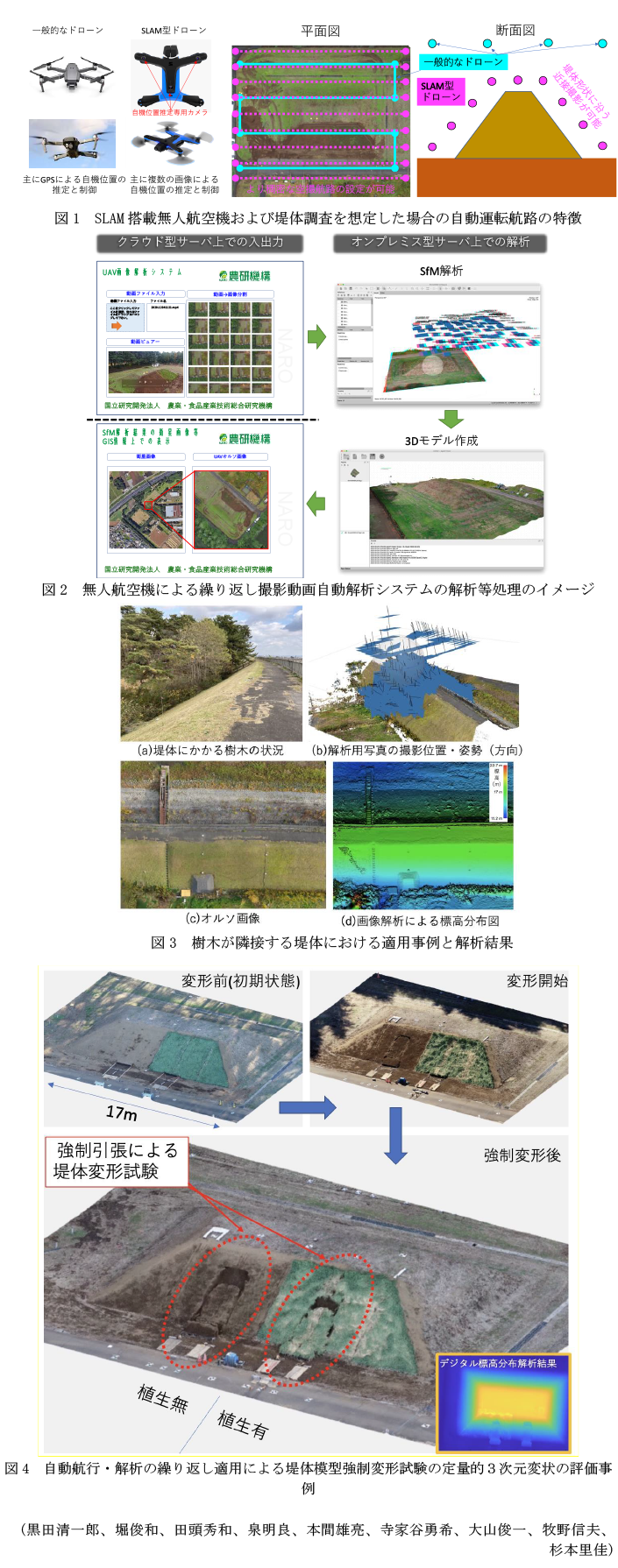
- 一般に無人航空機を高精度で位置制御するにはRTK-GNSSなどの比較的高額な測位システムを用いる必要があるが、農業用貯水池ではGPSの基準点情報が通信不良により得られない場合があり、また、谷地ではGPSの受信状況が悪く精度が悪くなることもある。SLAM搭載無人航空機を用いた場合には撮影対象物を基準とした自機位置把握と撮影制御が可能となる(図1)。
- 撮影データと解析結果を関係者間でクラウド上等で共有するために、動画ファイル入力画面、撮影動画分割プログラム、オンプレミス型画像解析サーバ、解析結果表示画面から構成されるプログラムを作成する(図2)。一般的な無人航空機は静止画自動撮影も可能であるが、動画であれば非専門家による操作でもより簡単にデータ取得が可能であり、取りこぼしなどのミスも防げることから、動画ファイルも受け入れ可能なインターフェースを構築する。これより撮影動画をクラウド上にアップロードすることで画像解析に供する画像ファイル群を構築できる。
- 2.までで生成された画像を多視点ステレオ写真測量(Structure-from-Motion,以下 SfM)により解析することで堤体形状を把握することができる。また、一度航路を設定すれば、無人航空機の詳細な位置制御により、再現性の高い繰り返し画像計測を行うことが可能となる。画像解析結果はオルソ画像および地表面標高データとしてGIS情報として表示できる(図2)。
- SLAM搭載無人航空機の場合には撮影対象の堤体形状を自機位置把握と移動制御の基準として、樹木を避けながらの低空航行と堤体への近接撮影を行うことで、高い地上解像度の画像データが取得可能となる(図3)。また、近接での繰り返し撮影と解析システムの繰り返し運用によって、堤体の変状把握等が可能となる(図4)。
成果の活用面・留意点
- 構造物を対象としてできる限り近接撮影を行なって詳細な画像を得ること、そして高精度かつ自動的に航路を設定して繰り返し撮影を行うことを目的としたためSLAM搭載無人航空機の事例を示したが、一般的な無人航空機にも活用することができる。
- SfMの解析パラメータの設定などについては専門家が実際に一度解析を行なって検討する必要があるが、それ以降はプログラミングによる逐次解析により自動的に解析制御が可能である。
具体的データ
その他
- 予算区分 : 交付金、その他外部資金(PRISM)
- 研究期間 : 2021~2022年度
- 研究担当者 : 黒田清一郎、堀俊和、田頭秀和、泉明良、本間雄亮、寺家谷勇希、大山俊一、牧野信夫、杉本里佳
- 発表論文等 :
- 黒田(2021)地盤工学会誌、69(8):23-30
- 黒田(2022)地盤工学会誌、70(8):9-16