果樹用パイプ誘導式防除用自動散布機
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
低樹高果樹の密植園を対象として,ノズル回動式散布装置を備え,地表面に敷設した外径3~4cmの誘導パイプに沿って無人走行する自動散布機である。作業者の農薬被曝防止,低騒音作業のほか,慣行の手散布に比較して高能率,省農薬の作業が可能である。
- 担当:生研機構・園芸工学研究部・果樹生産工学研究
- 連絡先:048-663-3901
- 部会名:果樹、総合農業・作業技術
- 専門:機械
- 対象:農業機械、果樹類
- 分類:普及
背景・ねらい
カンキツのコンテナ栽培や高うね栽培のように,スピードスプレーヤの導入が困難な密植果樹園において,作業の省力化と運転者への農薬被曝の回避を図るために,地表面に設置したパイプに沿って,防除作業を無人で行うことのできる自動散布機を開発する。
成果の内容・特徴
- 走行部の形式は,複輪式の前輪及び後輪からなる3輪式で,前輪の前方に補助誘導輪が連結されており,誘導パイプを挟んで走行する(図1,表1)。また,油圧式の無段変速機(HST)により,園地条件に適した任意の作業速度を選択することが可能である。
- 散布装置は,回動式ノズルによる無気散布方式なので,園外への飛散が少なく低騒音である。散布範囲の適用樹高は2.5m程度であり,樹高に応じて使用するノズルの個数及び角度を調節することができる。さらに,薬液を効率的に散布するため,赤外線式センサによって樹冠の有無を検出し,散布バルブを自動的に開閉する機能を備えている。
- 機体の発進,停止及び散布用バルブの開閉は,離れた場所から遠隔操作が可能である。また,移動時やパイプを敷設できない場所では,歩行用機械としての利用も可能である。
- 無人走行時の安全対策として,誘導パイプから脱輪した場合や障害物に接触したとき及びタンク内の薬液が規定量以下に減少した場合には,自動的に停止する機構を備えている。
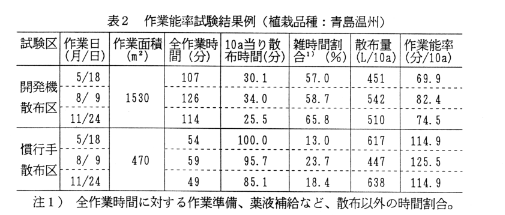
- ミカンのコンテナ栽培園で周年利用試験を行った結果,慣行の手散布に比較して散布時間では約1/3であり,薬液補給等を含めた作業能率は手散布の約1.5倍となった(表2)。また,薬液付着状態は良好であり,病虫害の発生率,果実品質等についても手散布との差は見られなかった(表3)。
成果の活用面・留意点
- 平成7年度に高性能農業機械実用化促進事業に移行し,平成8年から市販を予定している。
- 無人作業を行う園地の傾斜度は6度以内を目安とし,誘導パイプの曲線部は曲率半径を1.1m以上となるように敷設する必要がある。
具体的データ
その他の特記事項
- 研究課題名:果樹用パイプ誘導式防除用自動散布機の開発
- 予算区分:経常・緊プロ(委託)
- 研究期間:平成7年度(平成6年~7年)
- 発表論文等:平成6年度事業報告,平成6年度生研機構研究報告会資料