繋ぎ飼い用ティートカップ自動装着・搾乳装置
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
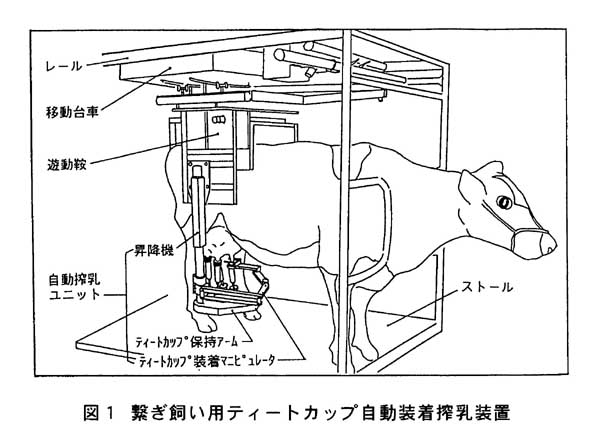
繋ぎ飼い用搾乳ロボットを前提としたティートカップ自動装着搾乳装置。移動台車に懸架した遊動鞍に軽量な自動搾乳ユニットを懸垂。遊動鞍で牛体を捕捉し、牛の動きに追従して自動装着を行う。
- 担当:生研機構・畜産工学研究部・飼料調製利用工学研究
- 担当: ・飼養管理工学研究
- 連絡先:048-654-7096
- 部会名:飼料利用
- 専門:機械
- 対象:農業機械
- 分類:研 究
背景・ねらい
繋ぎ飼いは、今後とも酪農において主要な位置を占めると考えられ、将来的には搾乳ロボットの導入が望まれている。しかし、フリーストール方式のように搾乳牛の自発的行動を前提とした搾乳ロボットは利用できない。そこで、繋ぎ飼いの搾乳牛にロボットが計画的にアプローチし搾乳することを前提として、ティートカップ(以下、単にカップと呼称することもある)を自動装着する搾乳装置を開発する。
成果の内容・特徴
- 本装置(図1)は、レールを移動する台車、その下面にローラによって懸架され前後左右に動く遊動鞍、そして遊動鞍の片側に搭載する自動搾乳ユニットで構成した。本装置はストール後方より係留牛に接近し、遊動鞍によって腰角の左右と座骨端の部位で牛体を捕捉する。この状態で牛体(乳頭位置教示データ)と自動搾乳ユニットとの相対位置関係を再現できる。
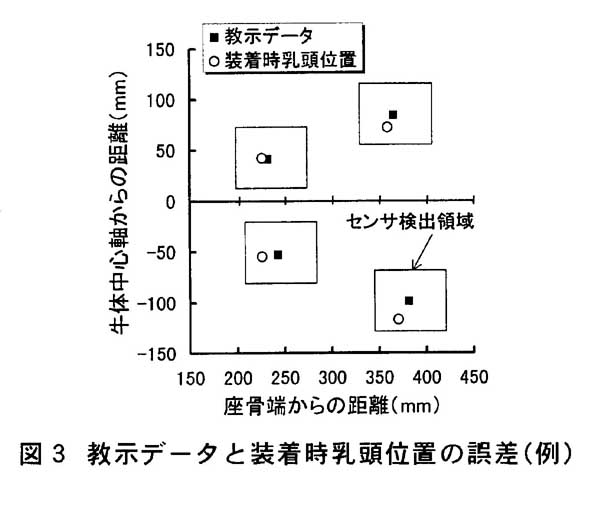
- 自動搾乳ユニットは約20kgと軽量でティートカップ保持アーム(約7.5kg)、ティートカップ装着マニピュレータ(約5.2kg) 及びこれらの高さを制御する昇降機で構成した。 装着マニピュレータは平面3自由度の多関節型であり、各軸ともACサーボモータにより制御される。カップ 把持に空圧ハンドを用い、その直上に乳頭位置セン サを配置した。センサが教示データに基づいて検出エリア内に乳頭を捉えると、センサ中心と乳頭検出位置と の偏差を20ms毎に修正し、偏差が設定値以下と なるとカップの装着動作を行う。
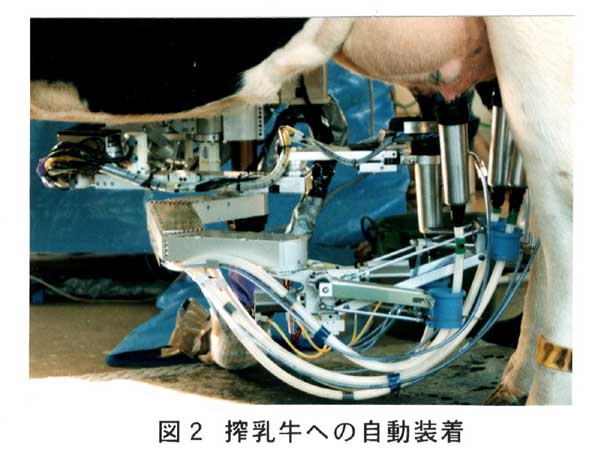
- 乳頭高430mm以上の2頭を供試した結果、カップの自動装着ができた (図2) 。装着動作には92~127秒を要した。なお、前搾りと乳頭清拭は人手で行った。教示データと装着時の各乳頭位 置の誤差は小さく (図3) 、カップ装着時及び搾乳中の牛体追従は良好で、遊動鞍をベースとした基本機構の有用性を確認した。
成果の活用面・留意点
- 乳頭清拭や自動搬送等の機能を加え、繋ぎ飼い用搾乳ロボットに発展可能である。
- 実用化段階までには乳頭検出センサを含めさらに改良を要する。
具体的データ
その他
- 研究課題名:搾乳ロボットの開発
- 予算区分 :経常・緊プロ(共同)
- 研究期間 :平成10年度(平成5~9年)
- 研究担当者:平田 晃、八谷 満、道宗直昭、古山隆司、八木 茂、石束宣明、諏澤健三、市戸万丈、福森 功、オリオン機械(株)、(株)コア
- 発表論文等:つなぎ飼い用搾乳ロボットの開発(第1報)、第57回農機学会年次大会講演 要旨、p425-426、1998
つなぎ飼い用搾乳ロボットの開発(第2報)、第57回農機学会年次大会講演 要旨、p427-428、1998
Developement of Milking Robot in Stanchion Barns, Dutch-Japanese Workshop on Precision Dairy Farming, p45-48, 1998
つなぎ飼い牛舎における搾乳の自動化、農機械学会誌第60第6号、p152-154
繋ぎ飼い用搾乳ロボット、畜産の研究、第53巻第1号p179-182