画像処理を用いたイチゴの自動選別パック詰め装置
要約
収穫箱から果実を取り出し、画像処理により大きさ別に階級判別し、吸着ハンドにより専用の通い容器及び平詰めソフトパックに向きを揃えて並べる自動装置である。果重の推定誤差は±2g以内、果実を収穫箱から取り出して出荷容器に並べるハンドリング成功率は97%である。
- キーワード:イチゴ、選別、パック詰め、画像処理、ソフトハンドリング
- 担当:農業機械化促進・IT・ロボット技術
- 代表連絡先:電話 048-654-7000
- 研究所名:生物系特定産業技術研究支援センター・園芸工学研究部
- 分類:研究成果情報
背景・ねらい
イチゴ生産の年間労働時間は約2,000h/10aと非常に長い。その中で選別パック詰め作業が3割を占め、省力化が求められているが、イチゴ果実が損傷しやすいため、機械化が進んでいない。そこで、収穫箱から果実を取り出し、画像処理により大きさ別に階級判別し、吸着ハンドにより専用の通い容器及び平詰めソフトパックに向きを揃えて並べる自動装置を開発する。
成果の内容・特徴
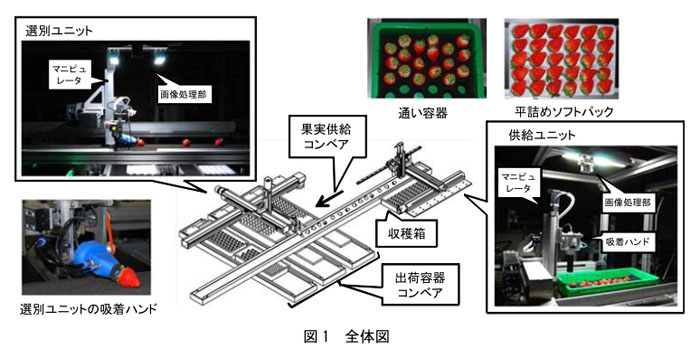
- 作業者は、収穫箱と出荷容器のセットを行うだけで、果実取り出しから、選別、パック詰めまでの作業を装置が自動的に行う。出荷容器は、慣行の2段詰めよりも流通・貯蔵時に損傷が少ないスポンジ製の専用の通い容器と一般に流通している平詰めソフトパックに対応している。
- 装置は、収穫箱から果実を取り出して1果ずつ果実供給コンベア上に置く供給ユニットと、果実供給コンベア上の果実を選別してパック詰めする選別ユニットから構成される(図1、表1)。出荷容器は、ステッピングモータにより位置決め制御する出荷容器コンベアで搬送される。
- 供給ユニットでは、画像処理により収穫箱内に散在する果実を検出し、吸着ハンドで1果ずつ吸着し、間欠運転する果実供給コンベア上に順々に置く。吸着ハンドの吸着管は果実に吸着管の先端を押しつけて傷つけることのないように抵抗なく上下に動く構造になっている。
- 選別ユニットでは、画像処理により得られた果実の投影面積から果重を推定し、さらに、果実方向を検出することで得られた果底部を、マニピュレータに装着された吸着ハンドで吸着し、大きさ別に出荷容器に向きを揃えて並べる。
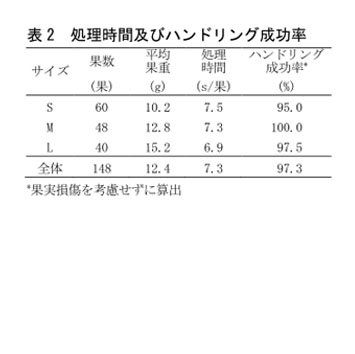
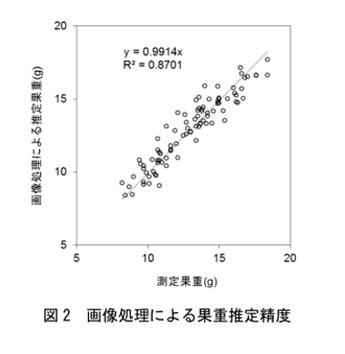
- 'さがほのか'の選別パック詰め作業におけるハンドリング成功率は97%、果実1果当たりに要する作業時間は7sと慣行の手作業と同等の能率である(表2)。また、画像処理による果重の推定誤差は±2gの範囲内である(図2)。各ユニットにおいて処理された後、2日間経過した果実で観察される損傷の割合は、供給ユニットで4%以内、拾上げユニットで3%以内である。
成果の活用面・留意点
- 'さがほのか'以外の品種に適用する場合、果重推定のための校正が別途必要である。
- 5g以上30g未満の果実に適応する。
- 果実の検出・取り出し精度を向上させるため、収穫箱の底面の緩衝材は黒色とする。
- 安定した画像処理を行うため、外乱光を遮断するなど光環境を整える必要がある。
具体的データ

(山本聡史、林茂彦、齋藤貞文、落合良治)
その他
- 中課題名:新たな農業生産システムの構築に資するIT・ロボット技術等の基盤的技術の開発
- 中課題番号:600d0
- 予算区分:交付金、委託プロ(アシスト)
- 研究期間:2007~2011年度
- 研究担当者:山本聡史、林茂彦、齋藤貞文、落合良治、芝浦工業大学
- 発表論文等:Hayashi et al.(2011) Biosystems Engineering.109(4):348-356