収穫箱から果実を取り出して選別するイチゴ自動選別装置の制御ソフトウェア
要約
画像処理を用いて収穫箱からイチゴ果実を自動で取り出してサイズ別に選別する装置の制御ソフトウェアである。7~28gの果実質量の推定精度は±3g以内である。収穫箱内の果実同士に大きな重なりがない場合、果実数を97%以上の精度でカウントする。
- キーワード:イチゴ、選別、ソフトウェア、画像処理、3次元センサ
- 担当:農業機械化促進・IT・ロボット技術
- 代表連絡先:電話 048-654-7000
- 研究所名:生物系特定産業技術研究支援センター・園芸工学研究部
- 分類:普及成果情報
背景・ねらい
イチゴ生産の年間労働時間は約2,000h/10aと非常に長く、その約3割が選別パック詰め作業に費やされているが、選別作業において果実質量と果実数を精度良く推定することによりライン処理ができ、効率化が図られる。そこで、イチゴの選別パック詰め作業の省力化を図るため、これまで開発されたイチゴ自動選別装置において、収穫箱内のイチゴ果実を取り出してサイズ別に選別するための制御ソフトウェアを開発する。
成果の内容・特徴
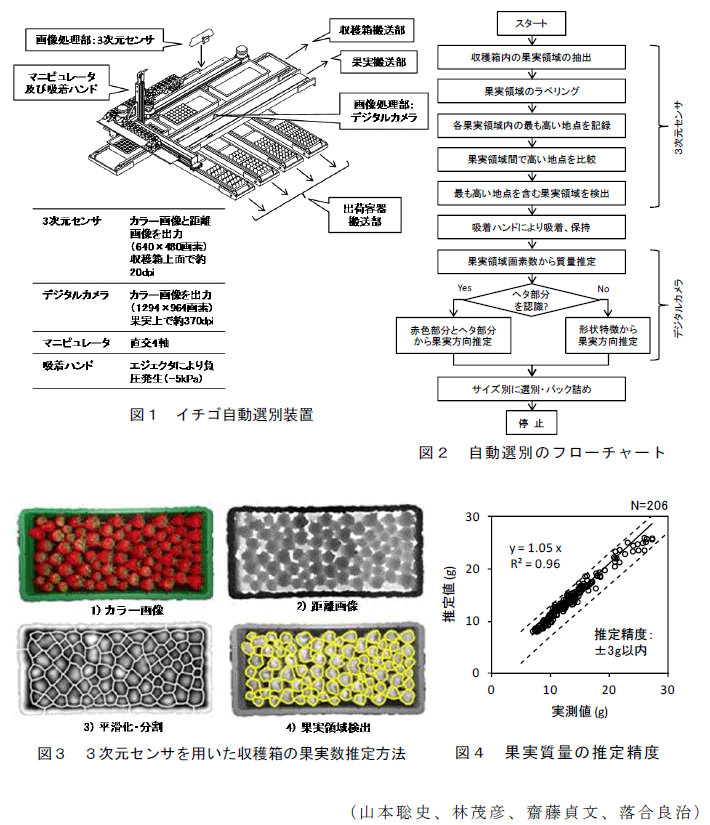
- 本ソフトウェアはマニピュレータ、吸着ハンド、画像処理部、収穫箱搬送部、出荷容器搬送部で構成される装置において、3次元センサによる収穫箱内の果実の検出、吸着ハンドを装着したマニピュレータの制御、ピッキング後のデジタルカメラによる果実の質量・方向の推定による果実の選別、収穫箱及び出荷容器の搬送制御を行う(図1)。なお、画像処理部の処理速度は1秒未満である。
- 自動選別の流れを図2に示す。収穫箱内の果実の検出では、3次元センサにより収穫箱内の果実領域を抽出し、複数の果実領域に分ける。複数の果実領域で最も高い地点を含む果実領域を、最も吸着しやすい果実として認識する。また、距離画像を滑らかにした後、分割した領域で、赤色を含み、明度の高い部分を果実領域として抽出することにより、果実数をカウントできる(図3)。また、抽出した果実領域の画素数から果実サイズを推定できる。
- デジタルカメラによる果実質量・方向の推定では、撮影した画像中の果実領域の画素数から果実の質量を推定し、果実領域の赤色部分とヘタ部分の重心の位置関係から果実の方向を推定する。吸着された果実のヘタ部分が認識されない場合、果実形状を考慮して、果実領域を囲む最小円の中心と果実領域内に収まる最大円の中心の位置関係から果実方向を求める。
- 「紅ほっぺ」を供試した場合、デジタルカメラによる7~28gの果実質量の推定精度は±3g以内(図4)、果実方向の推定精度は±25°以内である。静岡県内のイチゴの共同選果施設に搬入される収穫箱とほぼ同様の重なり状態の果実(品種:「紅ほっぺ」)に対して、97%以上の精度で果実数をカウントできる。
普及のための参考情報
- 普及対象:イチゴ生産団体、個人大規模生産者
- 普及予定地域・普及予定面積・普及台数等:静岡県等のイチゴ選果施設・5台程度
- その他:2012年度に選果機メーカと装置及びプログラムの利用許諾契約を締結。慣行の収穫箱を利用できるが、画像処理により果実と見分けられる色にする必要がある。果実質量・方向及び収穫箱内の果実数の推定精度を維持するため、整った形状でヘタの小さい果実がより適している。「紅ほっぺ」のみの試験であり、他品種であればソフトウェアの調整が必要となる場合がある。本ソフトウェアはVisual C++により開発されたものであり、Windows 7以降のOSを備えたパソコンが望ましい。
具体的データ
その他
- 中課題名:新たな農業生産システムの構築に資するIT・ロボット技術等の基盤的技術の開発
- 中課題番号:600d0
- 予算区分:交付金、委託プロ(アシスト)
- 研究期間:2007~2011年度
- 研究担当者:山本聡史、林茂彦、齋藤貞文、落合良治、山根俊(静岡農林技研)
- 発表論文等:
1) 山本ら「果実の容器詰め装置」特開2012-171664
2) 山本ら「イチゴ自動選別装置制御ソフトウェア」機構-S10(P10146号-1)