循環移動式栽培装置と連動する定置型イチゴ収穫ロボット
要約
定置型イチゴ収穫ロボットは、循環移動式栽培装置と組み合わせて、対象果実の三次元位置、着色度、重なり度合を計算し、果柄を切断して摘み取る。夜間に加え、昼間でも稼働でき、収穫割合は42~79%で、作業能率は280~350株/hである。
- キーワード:イチゴ、収穫ロボット、移動栽培、画像処理、エンドエフェクタ
- 担当:農業機械化促進・IT・ロボット技術
- 代表連絡先:電話 048-654-7000
- 研究所名:生物系特定産業技術研究支援センター・特別研究チーム(ロボット)
- 分類:普及成果情報
背景・ねらい
イチゴ栽培における労働時間はおよそ2,000時間/10aであり、トマトやキュウリなどの主要な果菜類に比べ、2倍近くの作業時間が必要である。その中でも、収穫作業は、赤く色づいた果実を順次収穫しなければならないことから収穫期間が長く、全体の4分の1を占める。そこで、栽培ベッドが縦方向と横方向に移動する循環移動式栽培装置と組み合わせて収穫適期果実を自動で採果する定置型イチゴ収穫ロボットを開発する。
成果の内容・特徴
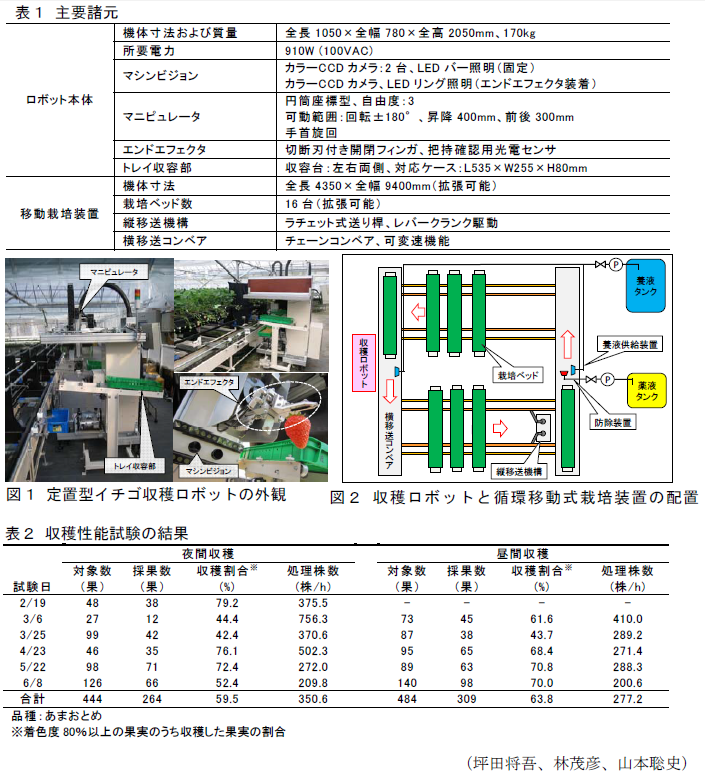
- 定置型イチゴ収穫ロボットは、循環移動式栽培装置と組み合わせて利用する。本ロボットは、イチゴを摘み取るエンドエフェクタ、果実を認識するマシンビジョン、果実にエンドエフェクタを接近させる円筒座標型マニピュレータ、およびトレイ収容部から構成される(表1、図1)。
- 循環移動式栽培装置は、栽培ベッドを縦方向に移送させる縦移送機構2台、横方向に移送させる横移送コンベア2台から構成され、縦移送と横移送を交互に繰り返すことで栽培ベッドを循環させる(表1、図2)。この装置は、農研機構成果情報2010の「イチゴの循環移動式栽培装置」を改良し、収穫ロボットとの通信機能を追加したものである。
- 収穫ロボットは、横移送コンベア中央に設置し(図2)、栽培ベッドの横移送中に、固定のステレオカメラで赤色果実の有無を走査する。赤色果実を検出すると栽培ベッドを停止させ、エンドエフェクタに搭載したカメラで、着色度判定と果実の重なりの判定を行う。収穫適期と判断した場合、エンドエフェクタにより果柄を切断する。
- 品種「あまおとめ」を供試した場合、収穫割合は夜間運転で42~79%である。作業を省力化でき、収穫した果実には損傷がなく、手収穫した果実と同様に出荷できる(表2)。果実への直射光を遮光することで、昼間でも稼働でき、収穫割合は44~71%で、夜間と同等の性能である。また、収穫処理できる株数は350株/h(夜間)、280株/h(昼間)である。夜間収穫の平均処理株数350は、慣行高設栽培のおよそ44m2に相当する。
普及のための参考情報
- 普及対象:大規模イチゴ農家
- 普及予定地域・普及予定面積・普及台数等:イチゴの主産地・20台程度
- その他:2014年に市販化の予定。本ロボットは循環移動式栽培装置に対応し、収穫ロボットが収穫できる高さ範囲(約25cm)に果実が入るように栽培する。収穫した果実は果柄つきである。また、果実の着果状態などに合わせて、果実の重なりの判定を厳しくするように、アプリケーションの設定を変更することで未熟果の誤収穫を低減させることができる。
具体的データ
その他
- 中課題名:新たな農業生産システムの構築に資するIT・ロボット技術等の基盤的技術の開発
- 中課題番号:600d0
- 予算区分:交付金
- 研究期間:2011~2013年度
- 研究担当者:坪田将吾、林茂彦、山本聡史、斎藤貞文、岡崎剛政(シブヤ精機(株))、瀬尾明(シブヤ精機(株))、鎌田順三(シブヤ精機(株))、稲積浩之(シブヤ精機(株))、Peter Rajendra(シブヤ精機(株))