静電散布とエアアシストを併用した園芸施設向け自動走行式防除機
要約
静電散布技術とエアアシスト技術とを組合せた散布装置を自動走行台車に搭載し、施設栽培作物の畝間を自動的に走行しながら農薬を散布する防除機。手散布では避けられない農薬被曝を避けながら、手散布並みの防除効果が得られる。
- キーワード:エアアシスト、静電散布、自動走行台車、施設内防除
- 担当:農業機械化促進・IT・ロボット技術
- 代表連絡先:電話 048-654-7000
- 研究所名:生物系特定産業技術研究支援センター・特別研究チーム(ロボット)
- 分類:研究成果情報
背景・ねらい
園芸施設では、近年、大規模化が進んでいるが、施設内は閉鎖された高湿度環境下であるため病害虫の大量発生を招きやすいこと等により、農薬散布作業が不可欠となっている。慣行作業の多くは、作業者が自ら噴霧ノズル等を持って歩行しながらの手散布が行われており、農薬被曝を避けるため、カッパなどを装着して行われ、高温・多湿環境下では、負担の大きい作業となっている。このため施設内における防除作業の負担軽減のための自動散布技術が開発され実用化されているが、手散布のように多様な条件下でも安定した防除効果を得るのは困難であるとされており、生産現場では作業負担軽減のため、手散布並みの散布性能を持つ自動散布が可能な防除機が望まれている。
そこで、農薬の噴霧粒子に静電気の力を付加して作物体への付着性能を向上させる静電散布技術と、噴霧方向に風を送り作物群落内への到達性を向上させるエアアシストの技術とを組合せ、手散布並みの防除効果を維持し、かつ防除作業の自動化によって農薬被曝を回避することが可能な防除機を開発する。
成果の内容・特徴
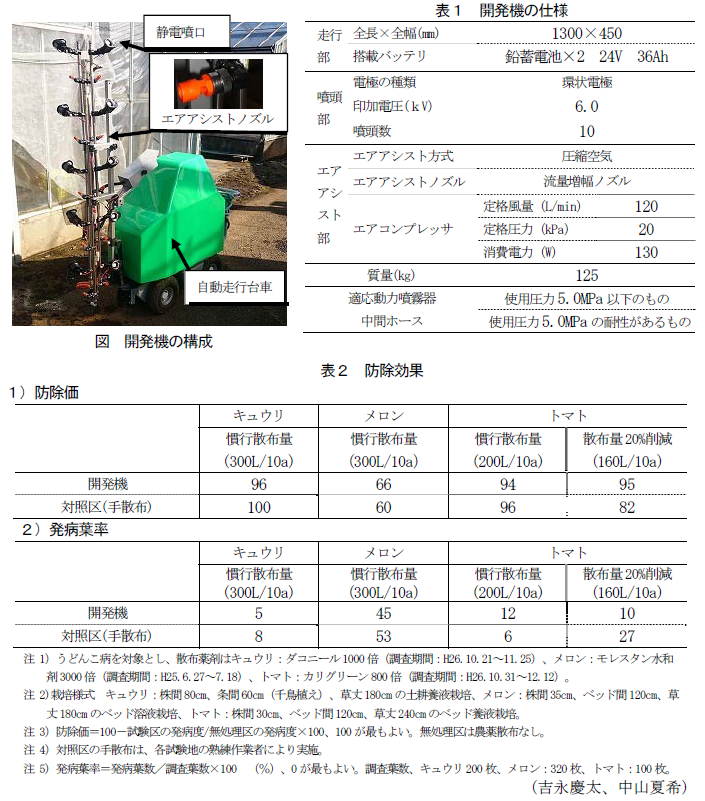
- 開発した自動走行式防除機(以下、開発機)は、自動走行台車、静電噴口部、およびエアアシスト部から構成される(図)。
- 自動走行台車は、バッテリ、ホースリールおよびエアコンプレッサを搭載し、モータ駆動により0.2~0.8m/sの作業速度でホースを繰り出し・巻き取りながら自走する(表1。土耕栽培では畝(畝高さ10cm以上)に追従し、また、ベッド栽培では温湯管等のレールに追従しながら自動散布し、畝またはベッド端に設置したセンサプレートを感知して後進散布に自動的に切り替わることで、往路、復路とも無人で散布する。畝・ベッド間の移動は、往復の散布終了後に作業者が枕地で手動操作により次の畝・ベッド間に移動させる。3時間半以上の連続運転が可能である。
- 静電噴口部は、噴霧粒子に静電気を付加する機構を有した静電噴口を片側5頭口ずつ、左右で10頭口を支柱に装備し、自動走行台車に搭載しており、機体両側の作物に向けて薬液を散布する。散布の高さは、支柱を変えることで最上位の噴口が1.6~3.2m程度まで可変できる構造となっている。
- エアアシスト部には、各静電噴口の間に、流量増幅型のエアアシストノズルを配置しており、自動走行台車に搭載したエアコンプレッサからの圧縮空気を噴出する。
- キュウリ栽培、メロン栽培、トマト栽培において、開発機は手散布と同等の防除価、発病葉率を維持できる。トマト栽培の例では、慣行散布量において、開発機と手散布の防除価は同程度であり、さらに、10a当りの散布量を20%削減した場合でも開発機は高い防除価を維持し、発病葉率を抑えることができる(表2)。
成果の活用面・留意点
- 慣行手散布に比べ、反当散布量を削減しても防除効果を維持できるため、生産資材費低減に寄与できる。
- 太陽光利用型植物工場のような大型施設においては、作業者1人で複数台の開発機を扱うことで、作業能率の向上が期待できる。
- 本防除機の導入に当たっては、走行が安定し回行などが円滑に行われるように、走行路、畝、枕路等を設置することが望ましい。
具体的データ
その他
- 中課題名:新たな農業生産システムの構築に資するIT・ロボット技術等の基盤的技術の開発
- 中課題整理番号:600b0
- 予算区分:交付金、緊プロ
- 研究期間:2012~2015年度
- 研究担当者:吉永慶太、中山夏希、NUGUYEN THI THANH LOAN、宮原佳彦、陶山純(みのる産業)、本荘陽一(みのる産業)、稲葉英毅(やまびこ)、窪田陽介(神戸大)
- 発表論文等:
1)吉永ら(2014)農業食料工学会誌、76(3):261-270
2)吉永ら 特開2014-193434 多頭口噴霧装置(2014年10月9日)