キャベツの個体別初期生育情報の連続測定法
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
ビデオカメラと位置センサを搭載したトラクタを用いた個体別生育情報の非破壊連続測定法を開発した。ビデオ画像の画像処理により作物の個体別投影葉面積と圃場内の相対位置をリアルタイムで連続計測し、ファイルに記録することができる。
- 担当:北海道農業試験場・総合研究部・総合研究第2チーム
- 連絡先:0155-62-9285
- 部会名:総合研究
- 専門:機械・作業
- 対象:野菜
- 分類:研究
背景・ねらい
大規模畑作地帯における土地利用型の野菜作、特に直播によるキャベツの作型では、発芽および初期生育の不揃いが生じる。そこで、作物個体の生育を追肥などの栽培管理により揃えるため、初期生育段階の作物個体の生育情報収集技術を確立する。
成果の内容・特徴
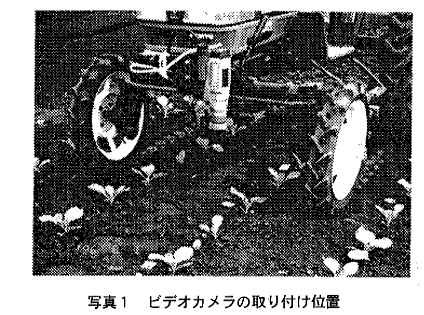
- 画像処理システムは、ビデオカメラ、フレームメモリ、ノート型パソコンで構成し、入力画像の解像度は512×512ピクセルで濃度はRGB各256階調である。ビデオカメラはキャベツ畦の直上約80cmの高さでトラクタに装着する(写真1)。
- 連続測定時において正確に一個体の投影葉面積を測定するために、一個体の葉身が複数の図形に分かれた場合にも、これを一個体の作物として判定し、さらに、一個体の作物の全体図が取り込み画像に含まれる場合のみを自動的に個体と認識する(図1)。なお、個体別投影葉面積は、作物として認識する最小面積を圃場状態に応じてあらかじめ設定することにより、小雑草が混在する状態でも計測できる。
- 作物個体の圃場相対位置は、トラクタの後車軸に設置したセンサにより一定の進行距離毎に生じさせる2相パルスの計数値、カメラ入力画像内での作物図形の重心位置(画面内における畦方向の座標)から算出する。舗装面での走行時における位置情報の分解能は約6mmである。
- トラクタ走行による連続測定では図2に示した制御を繰り返すために、個体毎に複数回の測定を行なうことになる。しかし、出力ファイルに記録された投影葉面積(画素数)、画像内重心位置及びトラクタの圃場相対位置データを、基準面積板の校正値、圃場状態に合わせた位置センサの校正値を用いて解析することにより、同一個体の圃場内相対位置は各測定ともほぼ同じで個体別生育情報を推定できる。(表1)。
成果の活用面・留意点
- 非破壊測定であるため、同一個体の生育量を経時的に測定する場合に利用できる。
- 記録された生育情報ファイルを用いて、圃場生育マップの作成に利用できる。
- 隣接個体の作物葉が重なる場合には、個体別の投影葉面積は測定できない。
具体的データ
その他
- 研究課題名:直播キャベツの生育斉一化のための個体管理技術の開発
- 予算区分:地域総合
- 研究期間:平成9年度(平成9~12年度)
- 研究担当者:石田茂樹,増田欣也,豊田政一
- 発表論文等:石田茂樹,豊田政一,増田欣也,画像処理によるキャベツの圃場生育量の測定法(その2);圃場内走行時のリアルタイム処理,農作業研究,32巻(別号1),97-98,1997