コンテナハンドリング装置を利用したキャベツ機械収穫体系
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
コンテナのハンドリング装置を架装したトラクタ牽引トレーラは一斉収穫機との伴走作業体系により、キャベツの収穫運搬作業を効率化する。また、作業者の疲労の発生に基づく許容作業時間から適正作業面積を得ることができる。
- 担当:北海道農業試験場・総合研究部・総合研究第2チーム
- 連絡先:0155-62-9284
- 部会名:総合研究(農業物理)
- 専門:機械、作業
- 対象:葉茎菜類
- 分類:指導
背景・ねらい
野菜産地における生産農家の高齢化、労働力不足等による野菜の供給力低下が懸念される中、大規模なキャベツ生産の機械化一貫体系の確立が急がれている。そこで、一斉収穫機の利用を前提として、キャベツ用大型コンテナのハンドリング技術を開発し、機械作業の効率化と作業者の疲労軽減に向けた作業体系化を図る。
成果の内容・特徴
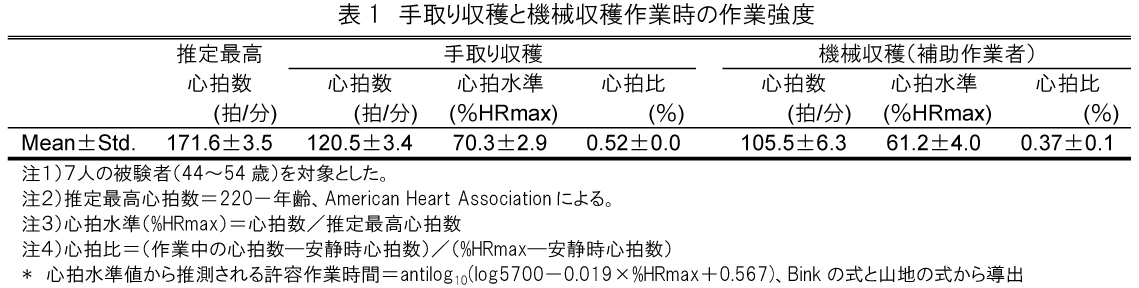
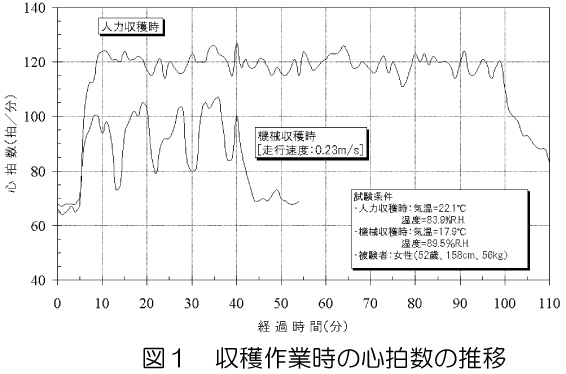
- キャベツ収穫作業者の心拍数を分析した結果、手取り収穫114~126拍/分(心拍水準70.3%HRmax)に対して98~116拍/分(同61.2%HRmax)である。一般的な作業限界値(65%HRmax)に対して、機械収穫作業はより持続的な作業が可能である(表1・図1)。また、機械収穫作業者の疲労から推定される許容作業時間*の目安は約100分である。
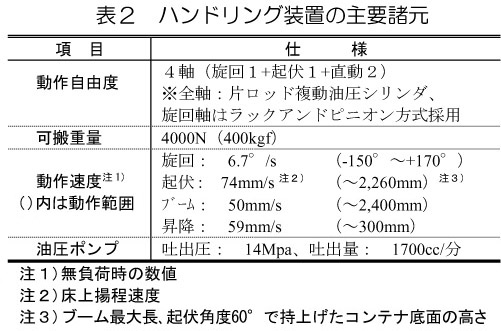
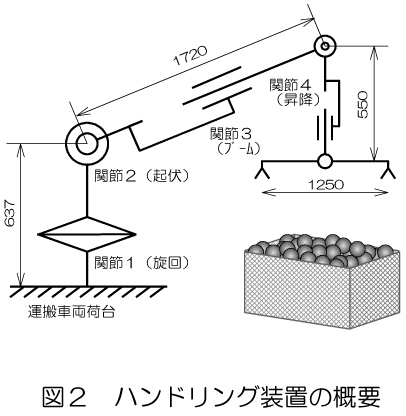
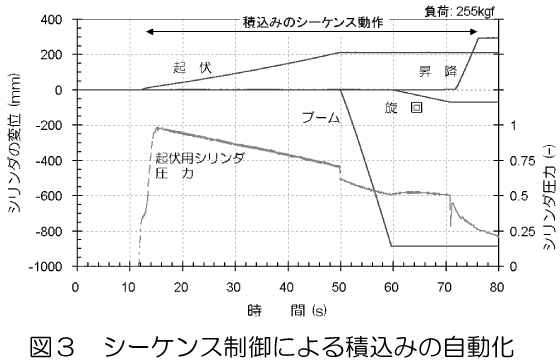
- 開発したハンドリング装置(表2・図2)は油圧シリンダ駆動による4自由度の極座標型多関節アーム機構である。本装置の利用場面は、トラクタ牽引トレーラに架装し、収穫機に伴走して順次コンテナを荷降し・積込むこと(積載個数:4個以上)を想定する。装置は有線式リモコンで遠隔操作できる。また、リレーシーケンス制御により、各関節を分担動作させてコンテナを自動的に50~60秒/個で荷台に積込む(図3)。
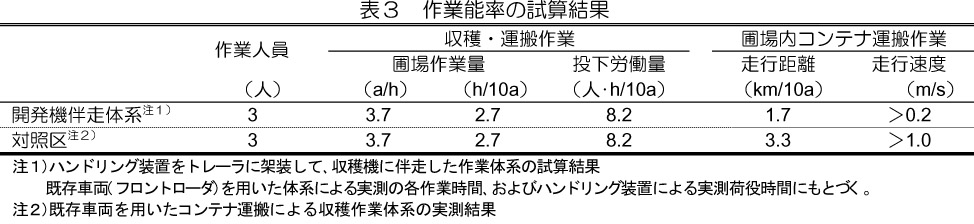
- 装置をトレーラに架装したときの収穫伴走体系(開発機伴走体系)では、フロントローダ等既存の運搬車両を用いたコンテナ運搬体系(対照区)と同程度の作業能率2.7h/10aである。また、複数個のコンテナを順次積載して運搬サイクルを単純化させることから、運搬に要する総走行距離を対照区の約半分に短縮して(表3)、投下エネルギ量を低減する。
- 機械収穫時の許容作業時間の目安と作業能率との比例配分によれば、機械収穫の適正な一連続作業面積は約6aと推測される。
成果の活用面・留意点
- キャベツ収穫の機械作業体系化を検討する際の資料として活用できる。
- 開発機伴走体系の導入により、土壌物理性を損なわない踏圧の軽減が期待できる。
- ハンドリング装置は上方から吊る機構のため、コンテナを一部改良する必要がある。
平成12年度北海道農業試験会議成績会議における課題名及び区分
課題名:コンテナハンドリング装置を利用したキャベツ機械収穫体系(指導参考)
具体的データ
その他
- 研究課題名:キャベツの高能率収穫・運搬システムの開発
- 予算区分:地域総合
- 研究期間:平成12年度(平成9~12年)
- 研究担当者:八谷 満、山縣真人、小島 誠、豊田政一
- 発表論文等:キャベツの機械収穫体系のためのハンドリング技術、
第60回農業機械学会年次大会講演要旨集、2001(発表予定)