Radio Frequencyタグを用いた農業用クローラ型車両の自動走行システム
要約
Radio Frequency(RF)タグによる測位を利用した、農業用クローラ車両の自動走行システムである。RFタグと慣性計測装置(IMU) を用いて目標経路に沿って走行できる。走行制御での誤差は、0.6m/sでの直進走行時で横偏差±0.3m以内である。
- キーワード:スライディングモード制御、パスフォロウイング、UKF、SLAM
- 担当:IT高度生産システム・大規模IT農業
- 代表連絡先:電話 011-857-9260
- 研究所名:北海道農業研究センター・水田作研究領域
- 分類:研究成果情報
背景・ねらい
熟練オペレータ不足の中、GPSを利用した農業用車両の自動走行技術が期待されている。しかし、コストや測位の安定性が依然として問題となっている。それらの問題の解決を目的として、Radio Frequency(RF)タグを利用した農業用車両の自動走行システムを開発する。
成果の内容・特徴
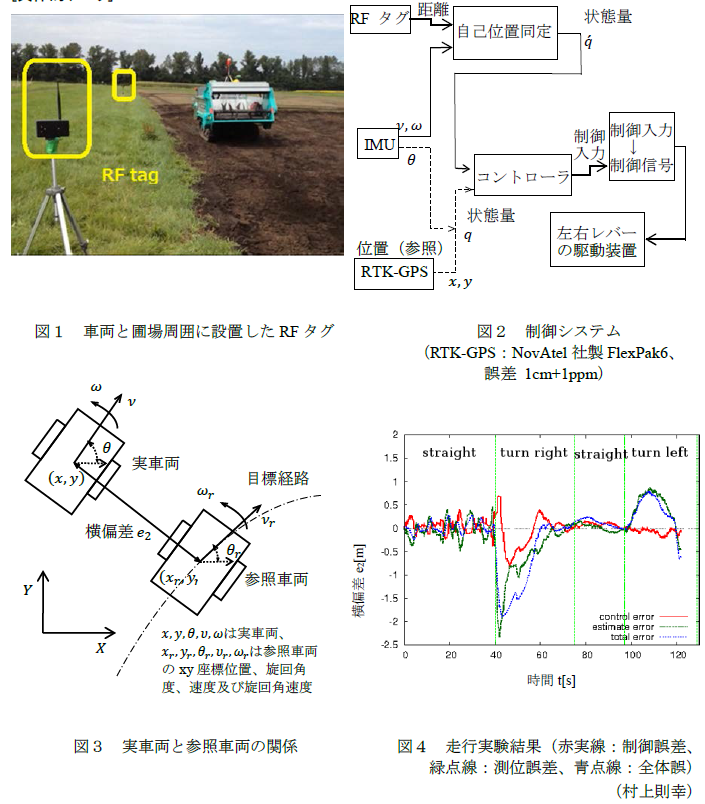
- 電源を有するアクティブ型RFタグ(Nanotron社製nanoLOC ranging radio)は、ラジオ波の伝達特性を利用してタグ間の距離を測る装置である。使用周波数は2.4GHz、通信距離は50m以上、測定誤差は屋外で1mである。それらを車両上部と圃場の外周に設置(実験でのタグ間の距離は25-50m)、車両にはIMU(Crossbow社製NAV440)を搭載している(図1)。
タグからの距離情報とIMUからの角速度情報により、作業する圃場図の生成と、圃場内での車両の位置や方向等の状態の推定を同時に行う(SLAM)。SLAMのための状態量q ?はq ?=[r0 ∅0 r0 ∅1???r0 ∅n θ]で表す(図2)。ここで、ri ∅i (i=0,1,???n)は、各タグの座標系原点からの距離及び偏角、r0 ∅0は移動タグ(車両)の位置、θは移動タグ搭載車両の姿勢である。 - 制御では理想とする経路上の車両を仮定し、実際の車両位置との誤差(横偏差)に基づき制御する(Path following)(図3)。センサのノイズ等の外乱やモデル化誤差に堅牢(ロバスト)な制御である、スライディングモード制御を適用する。
- RFタグの距離情報に含まれるノイズを除去するため、Unscented カルマンフィルター (UKF)を適用する。UKFは従来の拡張カルマンフィルターと異なり、近似点を確率密度関数で表現することから、推定値にバイアスが乗る場合や発散する等の問題を解決できる。位置推定誤差は±0.4m以内であった(図4、一点鎖線)。
- 堆肥散布を想定した曲線半径3m,直線部間隔6mの往復巡回経路を参照経路として、追従させる走行実験(走行速度:直進時0.6m/s、旋回時0.3m/s)の結果、直進時の横偏差は±0.3mであった(RTK-GPSで測定)。図2示す制御システムでRTK-GPSをRFタグの代わりに使用した場合の制御誤差は±0.1m以内であった(図4)。
成果の活用面・留意点
- 防風林のそば等のGPSの使いにくい環境で利用できる。特定省電力無線局であり免許等は必要ない。外部アンテナの利用により通信距離の拡大が期待できるが未検討である。
- 設置用タグ4台(大面積では増設)と車載用受信機のセットで購入時(2009年)は約50万である。後継機種は、筐体や電源を除く内部アンテナと基盤とのみで1台1万5千円程度である。
具体的データ
その他
- 中課題名:IT等の利用による精密・低コスト大規模農業のための基盤技術開発及び体系化
- 中課題整理番号:160d0
- 予算区分:交付金、その他外部資金(資金提供型共同研究(神戸大学))
- 研究期間:2010~2012年度
- 研究担当者:村上則幸、深尾隆則(神戸大)
- 発表論文等:入江ら(2014)、農業食料工学会誌76(2):163-169