コントラクタの作業計画策定を支援する作業シミュレータ
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
本ツールは、圃場を表す位置データと道路データを用いて,GISマップ上で作業受託圃場を巡回する最適なルートを探索・表示し、さらに圃場内作業及び圃場間移動に要する合計時間を推定する。
- キーワード:粗飼料生産、コントラクタ支援、GIS、ネットワーク分析
- 担当:九州沖縄農研・イネ発酵TMR研究チーム
- 連絡先:電話096-242-7574、電子メールkazushin@affrc.go.jp
- 区分:九州沖縄農業・農業経営
- 分類:技術・参考
背景・ねらい
粗飼料生産拡大のために、近年、コントラクタの重要性が高まっている。コントラクタの設立や効率的な運営のためには、圃場内作業だけではなく圃場間移動を含めた作業シミュレートを行い、それに基づく受託可能な圃場数や受託可能範囲を設定、さらには作業計画の策定を行う必要がある。本研究ではこのような作業計画策定を支援する作業シミュレートツールを作成する。
成果の内容・特徴
- 本ツールではシミュレートのためのデータとして、(1)作業予定圃場の位置データ、(2)作業エリアを網羅する道路データ、の2つを主に利用する(図1)。シミュレータ内部のプロセスは以下の通りである。
- シミュレータ内部のプロセス
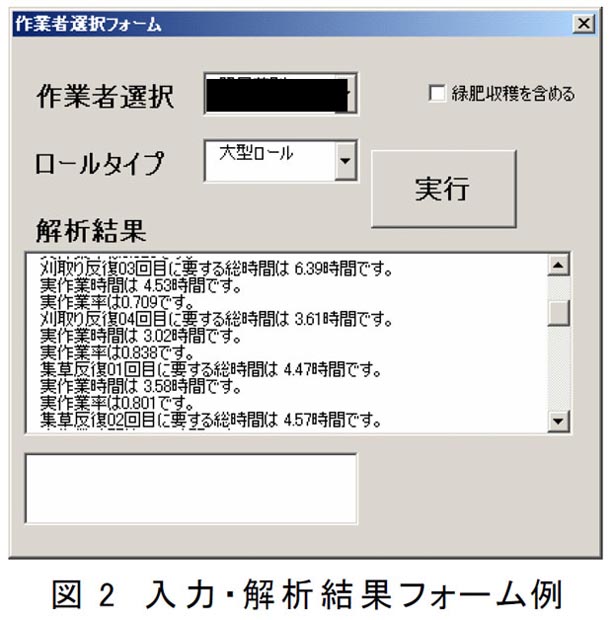
第1段階: フォームからの入力に基づき(図2)、全圃場を巡回する最適ルートを探索し、マップ上に表示する。
(これを初期ルートと称する。)
第2段階: 初期ルートを、1日当たり作業限界時間に基づき分割する。マップ上には分割されたルートが
作業日別に色分けされて表示される(図3)。作業時間等の解析結果はフォームに出力される(図2)。
第3段階: 牧草収穫のように工程が複数ある場合は、第2段階で推定された巡回ルートにおける各々の工程の
作業時間を推定、フォームに出力する(図2)。 - 上記の処理結果で得られた移動時間を考慮した効率的巡回ルートはコントラクタの活動範囲の目安となり、現状の活動範囲を視覚的に明らかにする。
- 新たな受託依頼があった場合には、その受託候補圃場と現状の巡回ルートを表示することにより、受託の可否を視覚的に検討することができる。また、その受託候補圃場を加えて再度シミュレートを行うことにより、巡回ルートや所要作業時間の変化が明らかとなる。
成果の活用面・留意点
- コントラクタをはじめとする各種作業受託組織が展開する地域で、受託圃場の設定やオペレータ間の作業圃場分担計画に活用できる。
- 作業予定圃場の位置データは面積及び前提となる機械装備の作業や移動に関する基礎データを含む必要がある。
- 本ツールは、ESRI社のArcGIS9のCOMコンポーネントを用いている。ツールの使用にはArcGIS9.1シリーズ、及びエクステンションNetwork Analystを要する。
具体的データ
その他
- 研究課題名:南西諸島における島しょ土壌耕地の適正管理、高度利用を基盤とした園芸・畑作物の安定生産システムの開発
- 課題ID:214-v
- 予算区分:沖縄広域連携
- 研究期間:2005~2006年度
- 研究担当者:西村和志