デジタルカメラによる植物生長の簡易モニタリング
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
植物の運動形態の一つであるサーカムニューテーションは植物の生長速度と相関があり,オプティカルフローと呼ばれる画像処理によって植物生長を2次元的に計測できる。この方法は,デジカメとパソコンのみで利用できる。
- キーワード:植物生長,サーカムニューテーション,デジタルカメラ,オプティカルフロー
- 担当:中央農研・農業情報研究部・モデリング研究室
- 連絡先:0298-38-7177hirafuji@affrc.go.jp
- 区分:共通基盤・情報研究
- 分類:科学・参考
背景・ねらい
植物生長の計測は現在でも大きさや重量を測る方法しかなく,非破壊・連続的に自動計測できる簡便な方法が望まれている。そのため画像処理による計 測手法が古くから研究されてきたが,葉による隠蔽や形状の複雑さのため,植物体の形状計測さえもまだ困難な状況にある。近年,デジタルカメラは高性能化と 低価格化が進み,画像データは現場で最も得やすいデータになって来た。そこで,画像に含まれる大量の情報から植物の動きに関する生理的特徴を抽出し,植物 の生育を簡便にモニタリングする情報技術を開発した。
成果の内容・特徴
- 近年のデジタルカメラには,夜間撮影機能(ストロボやナイトショット機能)や任意の時間間隔で自動撮影する機能(インターバル撮影,PCからの遠 隔操作)がある。この機能を使って静止画を10分程度の間隔で自動撮影し,これをPhotoshop等の画像編集ツールを用いて動画に変換すると植物の動 き(サーカムニューテーション)が観察できる。実際の動画はhttp://model.narc.affrc.go.jpにあるサンプルを参照のこと。
- サーカムニューテーションは休眠運動とは機構的に全く異なる運動であり,複数の植物種(トマト,バジル,葉ネギなど)を用いた実験では,供試した全個体で確認された。この運動は空間や光資源(テリトリー)を奪い合う競合のための物理的手段になっている。
- 2枚の静止画像からサーカムニューテーションによる葉の運動速度を計測し,相対生長速度(葉面積の変化)と比較したところ高い相関が確認された(図1)。
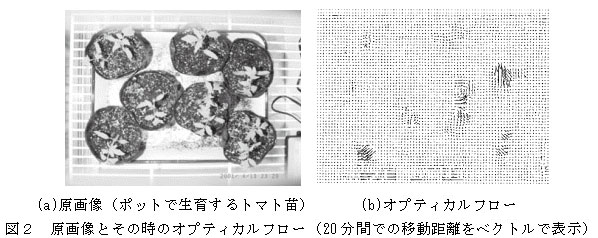
- オプティカルフロー計算(画像パターンの移動を空間的に計算する画像処理手法)により植物個体群の動き(速度場)を2次元的に可視化することができる。速度場と生育速度の大きさには線形相関関係があるため,植物の生育速度の違いを2次元的に把握できる(図2)。
成果の活用面・留意点
- 本技術は風による揺れが少ない育苗ハウス,施設園芸,植物工場,室内緑化等での生育モニタリングに適しているが,風が弱い時間帯があれば屋外の圃場でも利用可能である。
- デジカメはインターバル撮影機能を持つ機種を利用すること(例えば,リコー RDC-i 500)。
- オプティカルフローの画像処理計算にはフリーソフトが利用できる(例えばhttp://www.isi.uu.nl/people/michael/of.htm)。また,ソフトをインストールせずに誰もが利用できるWebサービスもある(http://extra.cmis.csiro.au/IA/changs/motion/)。
具体的データ
その他
- 研究課題名:閉鎖生態系のための適応制御手法の研究
- 予算区分:経常,日本宇宙フォーラム(競争的資金),科学技術特別研究員
- 研究期間:1999~2001年度
- 研究担当者:平藤雅之,岩淵桂子
- 発表論文等:
1)M. Hirafuji et al., MATE: Multi-purpose Artificial TerrestrialEcosystem for CELSS and Indoor Greenery, IFAC Agricontrol 2000, Proc. ofModeling and Control in Agriculture, Horticulture and Post-Harvest Processing, 2000
2)M. Hirafuji et al., Self-organization Model for daptive Control toArtificial Ecosystems, Proc of IFAC/CIGR Bio-robotics II: 2nd IFAC/CIGR International Workshop on Bio-Robotics, Information Technology andInTelligent Control for Bioproduction Systems, 2000.