農作業時に視界を妨げない情報提示機構
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
乗用型トラクタなどのオペレータが必要とする情報(たとえば目標とする車両経路からの位置ずれ量など)を、振動と振動音の骨伝導により、オペレータに提示する機構である。オペレータの視線移動や視線固定を誘発せず、作業時の安全確保に役立つ。
- キーワード:位置ずれ量、振動、骨伝導、視線
- 担当:中央農研・作業技術研究部・作業労働システム研究室
- 連絡先:電話029-838-8904、電子メールotobek@affrc.go.jp
- 区分:関東東海北陸農業・作業技術、共通基盤・作業技術
- 分類:技術・参考
背景・ねらい
定植、管理などの作業においては、オペレータが目標とする車両経路をなぞる「予定経路追従型」の作業が頻出する。このような作業中には、予定経路からの位置ずれ量を常に監視する必要があり、目標への視線移動や視線固定が生じやすく、車両周辺への注意不足が懸念される。一方、従来の予定経路追従アシスト装置では、位置ずれ量をLED指示器等により視覚的に提供する方式が一般的である。しかし、指示器を見ながらの作業は結果的に車両周辺への注意不足を生じるという短所がある。本成果は、オペレータの視線移動や視線固定を生じさせず、かつ視界を妨げずに、オペレータが必要とする情報を提示するための機構を提供する。
成果の内容・特徴
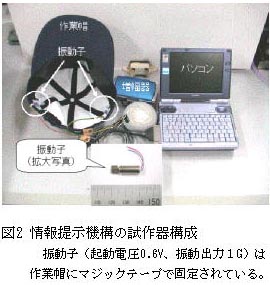
- 本機構は、作業帽の側頭部にあたる左右部位に取り付けた振動子をパソコンの入出力インターフェースにより制御することで、「右・左」、「(振動が)強い・弱い」「(振動間隔が)長い・短い」などの形式で情報を提示できる(図1、2)。
- 振動と骨伝導により知らせるため、乗用型トラクタによる予定経路追従作業においても、オペレータの視界を妨げず、かつ車体からの振動や騒音に妨げられずに、情報を受け取ることができる。
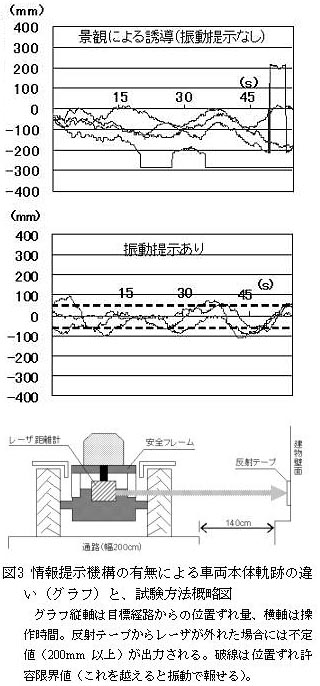
- 乗用型トラクタに取り付けたレーザ距離計、平坦で真直なコンクリート製通路、これに平行な建物壁面を利用して、壁面と車両との距離を位置ずれ量の指標とすることにより、本機構装着が予定経路追従性に及ぼす影響を簡易的に確認できる(図3)。
- 操縦経験時間1時間以下の非熟練オペレータが乗用型トラクタを約0.5m/秒で走行させた場合に、本機構装着の有無が車両軌跡に及ぼす影響を図3に示す。景観(壁面からの目視距離)だけに頼る操作では、車両軌跡が大きく蛇行、ないしは予定経路から逸脱しやすいことが示されている。これに対して、位置ずれ許容範囲を目標経路の±5cm以下として、これを越えた場合には越えた側の振動子を作動させる設定で装着した場合は、極端な逸脱がなく、目標経路周辺±10cmの範囲で車両位置が制御されている。
成果の活用面・留意点
- GPSやレンジファインダ等との併用により、予定経路追従型作業に際しての経路確認動作を減らすことができるため、心理的負担の軽減が期待できる。さらに、「視界を妨げない」という特性を利用して、GISや携帯電話からの情報(例えば農薬・肥料等の精密散布タイミング等)を作業中に提示する、などの利用方法も考えられる。
- 車両やオペレータのハンドル操作特性によって、目標からのオーバーシュート(行き過ぎ)量が異なるため、情報提示機構の側で、制御パラメータ(目標値、不感帯の大きさ、積分要素、遅れ時間等)を最適化する必要がある。
具体的データ
 |
 |
 |
その他
- 研究課題名:生産圃場における快適化特性要因の解明
(感覚フィードバックの機械操作性に及ぼす影響評価) - 課題ID:03-10-05-01-03-03
- 予算区分:交付金
- 研究期間:2000~2003年度
- 研究担当者:乙部和紀、佐々木豊、小林 恭