キャベツ栽培中の畝を追従できる畝間センサを用いた自律走行運搬車
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
無人で畝間を追従して走行する運搬車である。機械的に畝間を追従する畝間センサによる自律走行および遠隔操作が可能である。キャベツ栽培中の畝を操舵作業なく積載量500kg、速度0.44m/sで運搬作業が行える。
- キーワード:自律走行、運搬、畝追従、キャベツ
- 担当:中央農研・作業技術研究部・計測制御研究室
- 連絡先:電話029-838-8812、電子メールhides@affrc.go.jp
- 区分:関東東海北陸農業・作業技術、共通基盤・作業技術
- 分類:技術・参考
背景・ねらい
キャベツの選択収穫作業などに利用され、作物をまたぎ畝間を走行する運搬車は作物を傷つけることなく畝から逸脱しないように操舵し なければならない。しかし足場が悪い、積載物が前方の視界を妨げるなど操縦は煩雑である。畝を無人で追従走行できれば、操舵から開放され、運搬車の使いや すさが向上し、軽労化が図られる。そこで、作物が栽培中の畝でも追従可能な畝間センサを装備する自律走行運搬車を開発する。
成果の内容・特徴
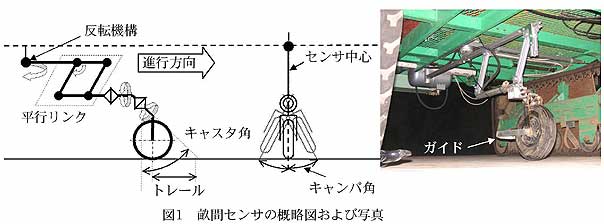
- 自律走行運搬車は市販のクローラ式運搬車をベースにし、無線による遠隔操作および畝間センサによる畝間追従機構による無人走行が可能である(表1)。畝間追従の対象となる栽培様式は運搬車が跨いだ畝の谷がトレッド中心となる様式である。畝間センサは車両の底面のトレッド中心、前後位置は前進時にはクローラ先端に、後進時にはセンサの反転機構によりクローラ後端に位置する。前後進ともに同じセンサで畝間追従でき、方向転換することなく往復が可能である。
- 畝間センサは空気圧タイヤ(直径20cm)、2つの回転軸、平行リンクからなる(図1)。畝間センサは平行リンク、アライメントの作用により機械的に畝の追従動作をする。畝と車両の相対位置がずれると畝間センサのキャンバ角が変化する。キャンバ角をカムとリミットスイッチで電気的に検出して車両の操舵制御信号とし、畝と車両のズレを修正しながら走行する。
- 成形直後の畝では最大積載量500kg、最高速度0.44m/sで積載物の落下および畝の逸脱がなく畝間中心から±10cm以内のズレで走行可能である(図2)。
- 畝間センサがキャベツに引っかからないように空気圧タイヤにガイドをつけることで、クローラの走行によるキャベツの外葉の損傷はあるが結球部を傷つけることなく、キャベツ栽培中でも無人走行が可能である(図3)。
成果の活用面・留意点
- 圃場の状態、畝の様式・形状により動作確認が必要である。
- 中耕などによって畝間を深くすることで追従性能が安定する。
具体的データ

その他
- 研究課題名:自律走行運搬車を用いたキャベツの選択収穫・運搬技術の開発
- 課題ID:03-10-02-01-20-05
- 予算区分:交付金
- 研究期間:2004∼2005年度
- 研究担当者:齋藤秀文、宮崎昌宏、建石邦夫、小林 恭