CANバス利用によりセンシングデバイスの共用が容易な自脱コンバインロボット
要約
GPS 等のセンシングデバイスからの情報に基づき、予め計画した目標経路に追従して自律走行による収穫作業を行う。 CANバスを介した制御によりセンシングデバイスの着脱と共用は容易であり、ロボット農作業体系のイニシャルコスト低減に資する。
- キーワード:収穫ロボット、CAN、コンバイン、RTK-GPS、ECU
- 担当:中央農研・高度作業システム研究チーム
- 代表連絡先:電話029-838-8815
- 区分:共通基盤・作業技術、関東東海北陸・作業技術
- 分類:技術・参考
背景・ねらい
日本農業の問題点として担い手の減少と高齢化、さらに分散錯圃状態による規模拡大の阻害等が挙げられる。それら諸問題克服のために、一人の作業者によって複数のロボットを同時使用するロボット農作業が有効と考えられる。しかし自律走行型農作業ロボットは高価なセンサと制御装置を用いるため、実用にはコスト低減が必要である。そこで「自律走行型農作業ロボットへのCANバス利用」(2008年度、成果情報)を活用し、農作業ロボットによる無人一貫体系の構築に向け、センシングデバイスの着脱が容易な自脱コンバインロボットを開発する。
成果の内容・特徴
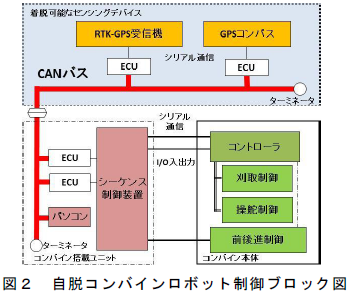
- 自脱コンバインロボット(図1)は自脱コンバイン(井関農機HF443、4条刈、31.6kW)を供試車両とし、センシングデバイスとして位置情報取得にはRTK-GPS(ニコントリンブル、MS750)、方向・方位情報取得にはGPSコンパス(へミスフィア、V100)を装着した。センシングデバイス、制御アクチュエータは中央農研で開発したNARC CANボードを利用したECU(Electronic Control Unit)を介して、操舵・走行制御等を指示するパソコンは内蔵CANカードを介してCANバス上に接続される(図2)。
- パソコンからの指示による操舵制御、刈取制御、前後進制御はCANバス上に接続された制御用ECUにより分散して制御される。手動・自動運転の切り替えはスイッチで操作できる。
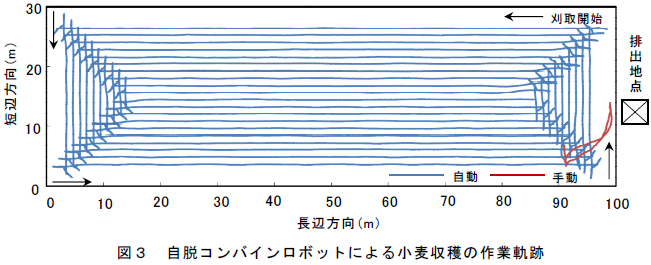
- 旋回スペースを確保するため最外周3周分を手動収穫した後は、直進、旋回、後進制御を組み合わせることで、自律走行による周り刈り収穫作業が可能である。また、グレンタンク満量時には走行停止するが、排出地点への移動、排出、収穫場所への復帰は手動運転で行う。水田圃場(100m×30m)での収穫作業能率は手動収穫、排出作業を含め、作業速度0.6m/sで17a/hが見込める(図3)。
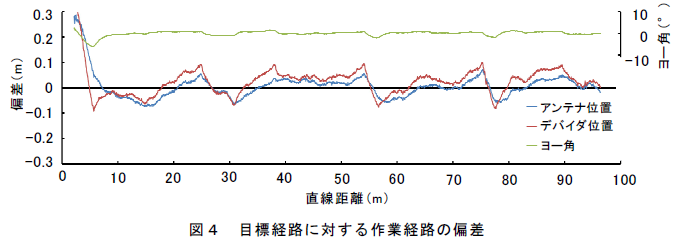
- 水田圃場(100m×30m)での自律走行の精度(目標経路と走行軌跡との偏差)は長辺方向でRMS0.05m、短辺方向でRMS0.09mである。旋回直後の偏差が大きいため短辺方向の精度は劣るが刈り残しはない(図4)。
成果の活用面・留意点
- CANバス利用によってセンシングデバイスの着脱と共用は容易であり、ロボット農作業体系全体のイニシャルコストの低減が図れる。各種の自立走行型農作業ロボットにおいてもCANバスの利用を推進することで、農作業ロボットによる無人一貫作業体系を構築できる。
- 最外周3周分と、グレンタンク満量後の排出作業は手動で行う必要がある。
具体的データ

その他
- 研究課題名:農作業ロボットによる分散錯圃に対応した超省力作業技術の開発
- 中課題整理番号:223a
- 予算区分:基盤、交付金プロ(農作業ロボット)
- 研究期間:2008~2010年度
- 研究担当者:齋藤正博、玉城勝彦、西脇健太郎