効率的なCAN導入を実現するマイコンボードNARO CAN BOARD
要約
NARO CAN BOARDは機械制御分野での標準的通信手法であるCANに対応したマイコンボードである。本ボードと添付のソースコードを使うことによって、農業機械用ECUを効率的に開発できる。
- キーワード:農業機械、CAN、ECU、分散計測制御
- 担当:農作業ロボット体系・農作業ロボ
- 代表連絡先:電話 029-838-8481
- 研究所名:中央農業総合研究センター・作業技術研究領域、近畿中国四国農業研究センター・営農・環境研究領域、北海道農業研究センター・畑作研究領域
- 分類:普及成果情報
背景・ねらい
近年、自動車やロボットの制御にCAN(Controller Area Network、シリアル通信技術の一種)が導入されている。高い品質と低コストを両立した分散計測制御システムを構築することが可能なCANは、農業機械の制御にも有用である。しかしながら、CANに対応したマイコンの新規導入には、周辺回路の設計からソースコード作成のノウハウ習得に至るまで、多くの労力を要する。そこで、農業機械の制御に必要と思われる基本的入出力回路を実装したCAN対応マイコンボードと、それに対応したサンプルコード群を開発する。これらを使用することにより、CAN導入に係る労力を削減し、農業機械用ECU(電子制御ユニット)の研究開発を効率的に進めることが可能となる。
成果の内容・特徴
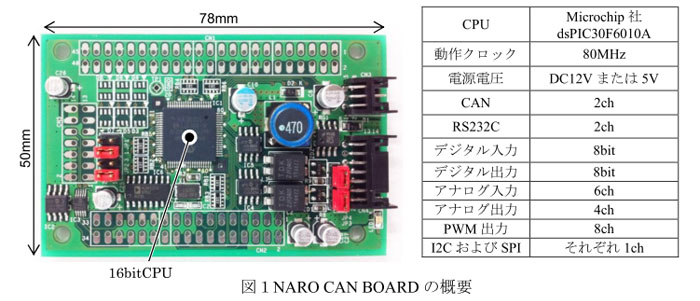
- NARO CAN BOARDは、CANによる情報の送受信を行うことができるマイコンボードである(図1)。大きさは、縦50mm ×横78mm(名刺と同等のサイズ)。80MHzで動作する16bitCPUを実装している。
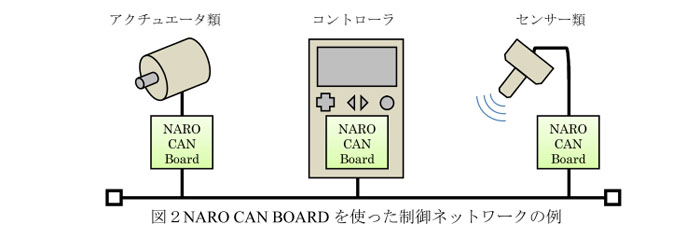
- 2chのCAN、それぞれ8bitのデジタルI/Oの他、モーター制御するためのPWM出力やアナログ入出力などを備え、農業機械用ECU開発に使用できる(図2)。
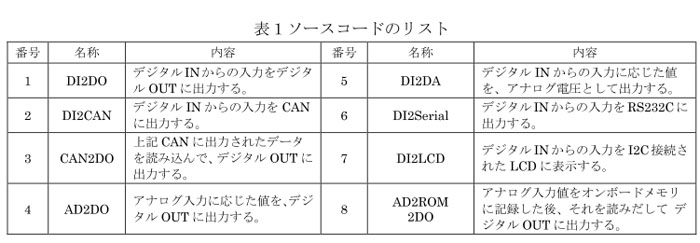
- 付属するソースコード群(表1)は、CAN通信やデジタルI/O、アナログ入出力等の単純な機能を実現する。必要最低限の短いソースコードで書かれており、内容を理解しやすい。これらを参照することにより、必要なアプリケーションを効率的に開発できる。実行ファイルの生成には、CPUメーカーが提供している開発環境(MPLABおよびC30コンパイラ、Microchip社)を使用する。
普及のための参考情報
- 普及対象:農業機械メーカー、大学、国公立研究機関。
- 普及予定地域:日本全国、普及予定枚数は初年度20枚を目指す。
- 開発環境構築手順の解説を含んだマニュアルとサンプルコードの入ったCD付きで、2012年7月に市販予定。
具体的データ
(西脇 健太郎)
その他
- 中課題名:土地利用型大規模経営に向けた農作業ロボット体系の開発
- 中課題番号: 160a0
- 予算区分:交付金、委託プロ(アシストプロ)
- 研究期間:2009~2011年度
- 研究担当者:西脇健太郎、奥野林太郎、濱田安之、元林浩太
- 発表論文等:1) 西脇健太郎、玉城勝彦「NARO CAN BOARD用サンプルプログラム」職務発明プログラム(機構A-22)
2) 西脇健太郎(2011)農業機械学会誌、73(4):224-226