大豆用コンバインロボットによる収穫同時排出作業
要約
自動収穫を行う大豆用コンバインロボットにグレンコンテナを搭載した有人軽トラックを併走させ、収穫と同時に排出を行う。大豆用コンバインロボットのグレンタンクが満量にならないように、排出することで連続的に収穫作業が可能となる。
- キーワード:収穫ロボット、コンバイン、CAN、RTK-GPS、同時作業
- 担当:IT高度生産システム・農作業ロボット体系
- 代表連絡先:電話 029-838-8481
- 研究所名:中央農業総合研究センター・作業技術研究領域
- 分類:研究成果情報
背景・ねらい
農業従事者の高齢化と担い手の減少が問題点として挙げられ、さらに分散錯圃状態下での経営規模拡大が農業機械の運用の阻害要因となっている。このような状況での問題解決には作業の無人化の拡大による省力化、効率化が必要不可欠である。さらに土地利用型農業では、耕起、移植、収穫等の自動化、無人化が進んでいるが、作業工程の中には作業者とロボットとの協調作業も不可欠である。そこで「CANバス利用によりセンシングデバイスの共用が容易な自脱コンバインロボット」(2010年度、成果情報)を活用して大豆用コンバインロボットを開発し、自動収穫と排出を同時作業とすることで作業人員の削減と、作業効率の向上を目指す。
成果の内容・特徴
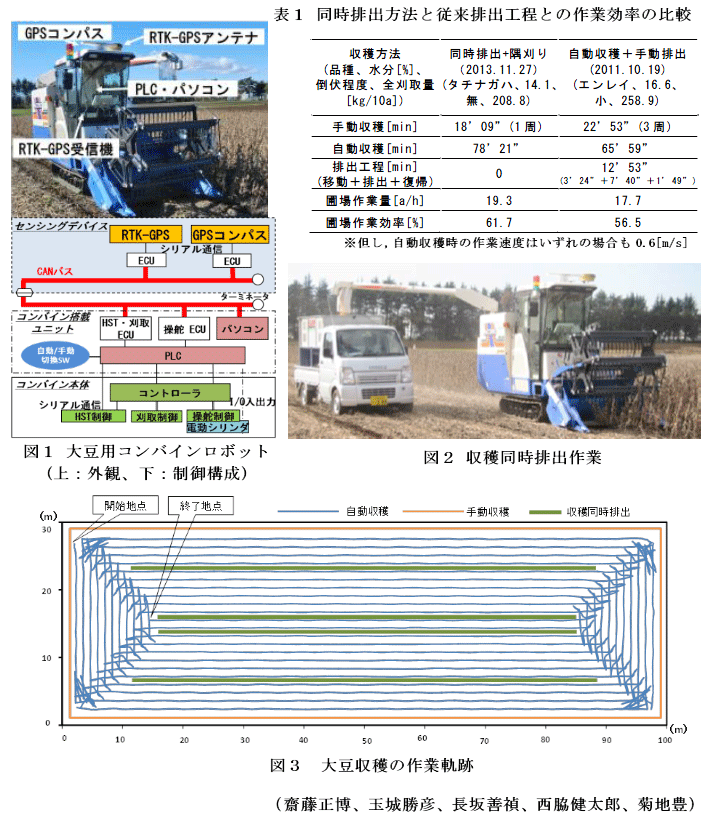
- 大豆用コンバインロボットはセンシングデバイス(RTK-GPS、GPSコンパス)から得られた位置・方位情報に基づいて、直進制御、後進制御、旋回制御を組み合わせ、予め設定した経路に沿って周り刈り作業が可能である。圃場の最外周1周分を手動収穫した後、隅刈りを含む周り刈り作業を自動で行う。また、切り替えスイッチにより自動・手動運転が切替え可能である。センシングデバイスはCANバスを介することで容易に着脱可能な構成であり、自脱コンバインロボットと共通利用できる(図1)。
- 収穫、排出の同時作業ではグレンコンテナを搭載した軽トラックが自動収穫中の大豆用コンバインロボットに併走し、自動収穫と排出を同時に行う(図2)。軽トラックの運転手がコンバインのオーガを任意のタイミングでスマートフォンを使用して無線操作し、車両を運転しながらモニタを確認して収穫物をグレンコンテナに排出する。軽トラックはそのまま収穫物を乾燥調製施設へ搬送する。大豆用コンバインロボットはグレンタンクが満量になった場合には自動停止して待機するが、満量になる前に排出作業が行われるため、収穫作業を中断すること無く、排出工程にかかる時間を短縮できる。また軽トラック側からも自動収穫を停止できる。
- 収穫、排出の同時作業は、排出工程(移動、排出、復帰)を必要とする従来の自動収穫作業に比べ、かかる時間を約13分短縮し、圃場作業効率は約5%向上する(表1)。大豆圃場(100m×30m)における自動収穫時の走行精度(目標経路と走行軌跡との偏差)は長辺方向でRMS0.07m、短辺方向でRMS0.09mであり、条間(60cm)に対して十分小さい。また周り刈り1周分を除いて全て自動走行である(図3)。
成果の活用面・留意点
- 軽トラックが走行可能な平坦、長方形圃場で倒伏のない生育状況下で適応可能である。
- 圃場の安全確認および作物に適した作業調整のため、最外周1周分を手動で行う必要がある。
具体的データ
その他
- 中課題名:土地利用型大規模経営に向けた農作業ロボット体系の開発
- 中課題整理番号:160a0
- 予算区分:交付金、委託プロ(農作業自動化)
- 研究期間:2011~2013年度
- 研究担当者:齋藤正博、玉城勝彦、長坂善禎、西脇健太郎、菊地豊
- 発表論文等:
1)斎藤ら(2013)農業機械学会誌、74(4):312-317
2)Saito M. et al. (2013) 4th IFAC Conference on Modelling and Control in Agriculture, Horticulture and Post Harvest Industry、10.3182/20130828-2-SF-3019.00058:148-153