移動作業型フィールドサーバを用いた広域・精細モニタリング手法
要約
開発した移動作業型フィールドサーバは、高積載量を実現し不整地を安定移動できる6脚歩行ロボットと、軽量・省電力で広範囲の作業領域をもつロボットアームを備えており、従来型フィールドサーバよりも高度で柔軟な遠隔移動圃場計測を実現できる。
- キーワード:フィールドサーバ、軽作業アーム、歩行ロボット、圃場モニタリング
- 担当:IT高度生産システム・農業情報統合利用
- 代表連絡先:電話 029-838-8481
- 研究所名:中央農業総合研究究センター・情報利用研究領域
- 分類:研究成果情報
背景・ねらい
作物・環境などの圃場情報を取得する方法のひとつとして、定点観測を行うフィールドサーバがこれまでに開発されてきた。今後、面的な情報の取得・群落内での詳細な観測・複雑な手順を必要とする計測などが求められるようになると、これまでのものでは実現が難しい。新たな計測手法として、近年マルチコプターなどを利用したリモートセンシングが盛んであるが、圃場上空からしか観測できない・重たく繊細な計測機器は搭載できない、などの課題が存在する。そこでこれまでのフィールドサーバに移動機構ユニットとマニピュレータを搭載した移動作業型フィールドサーバを開発し、これらの課題を解決する新たな広域・精細モニタリングを実現する手法を提案する。
成果の内容・特徴
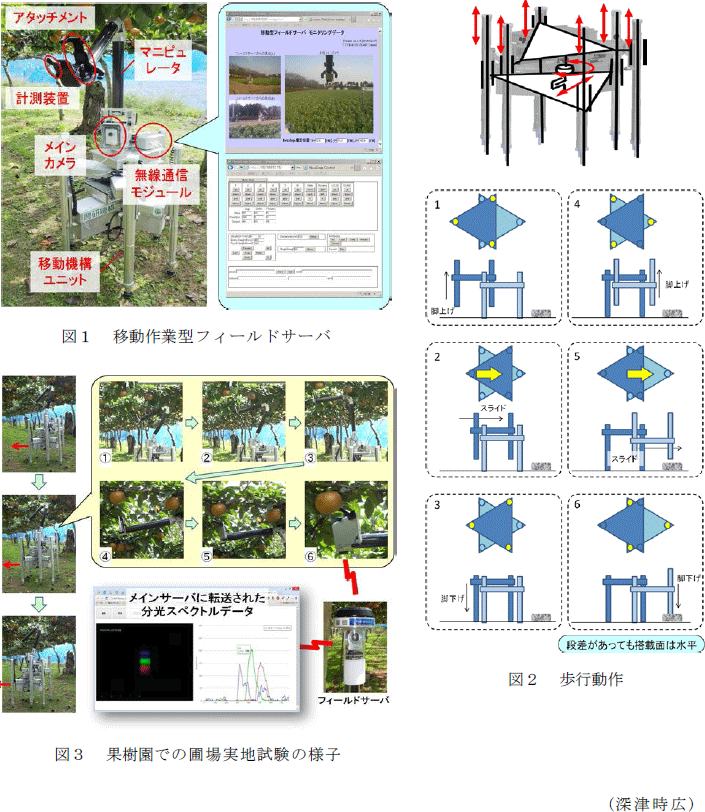
- 開発した移動作業型フィールドサーバ(図1)は、大きさ64cm×55cm×92cmで重さ63kgである。従来のフィールドサーバと相互に通信し、同じようにインターネット経由で遠隔地からWeb上で操作できるほか、管理プログラムで定期的に自動運行できる。
- 移動機構ユニットには2群3脚式の歩行ロボットを使用することで、高積載量(20kg)を実現し、搭載面を水平に保ちつつ不整地を安定して移動(2m/min)できる(図2)。
- マニピュレータには3自由度の軽作業用アームを使用し、非円形プーリバネ系による自重補償機構により軽量(5kg)・省電力(各軸20W)で広範囲(半径1m)の作業領域をもちながら先端に0.5kg(調整により増大可)の機器を取り付けて計測可能である。
- 移動作業型フィールドサーバは通常充電ステーションを含むドックに滞在し、1回で約2時間の移動計測が可能である。移動計測時は周囲の定点フィールドサーバや本体付属カメラからの画像情報などを利用することで容易に操作可能である。
- マニピュレータ先端に携帯端末型分光デバイスを取り付け、長野県小布施町の果樹園にて圃場実験を行ったところ、遠隔操作によって目的とする複数のナシ果実表面の分光データを問題なく取得することができる(図3)。
成果の活用面・留意点
- 本体またはマニピュレータ先端に搭載する計測機器は自由に変更可能であり、先端形状を変更することで対象を挟む・裏返す・どかす、といった柔軟な計測も可能である。
- 移動機構ユニットは、あぜ道や果樹園内などで安定歩行を確認しているが、脚先や制御手法などを工夫すれば、構造上ぬかるみや傾斜地なども歩行可能である。
- 現時点では、自動運行時における安全確認機能や通信・バッテリ切れによる操作不能回避機能などは備えていないため、システム利用時には注意が必要である。
- 今回開発した移動作業型フィールドサーバは、実験用のため製作費用はおよそ500万円であり、研究における現場詳細データの取得などへの活用が考えられる。
具体的データ
その他
- 中課題名:多様な農業情報の効率的収集技術及び統合利用技術の開発
- 中課題整理番号:160b0
- 予算区分:交付金、競争的資金(科研費)
- 研究期間:2012~2014年度
- 研究担当者:深津時広、遠藤玄(東京医科歯科大)
- 発表論文等:深津ら(2014)農業情報研究、23(4):140-153