光ファイバジャイロスコープを使用した自律走行4輪トラクタの走行制御
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
光ファイバジャイロスコープおよび超音波速度計を使用し、機体の位置をリアルタイム認識しながら定められた経路を走行する自律走行4輪トラクタを開発した。実際に圃場で作業試験を行った結果、平坦な圃場における施肥、播種作業に適用可能と判断された。
- 担当:草地試験場・飼料生産利用部・栽培工学研究室
- 連絡先:0287-37-7801
- 部会名:草地・飼料利用総合農業・作業技術
- 専門:機械作業
- 対象:牧草類農業機械
- 分類:研究
背景・ねらい
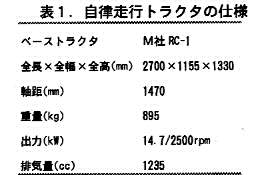
飼料生産における圃場は非常に広大となる事が多い。またその機械作業は単調で時間がかかるものが多く、オペレータは大きな負担を強いられる。そこで定められた経路を確実に走行するための自律走行トラクタ(表1)を開発し、実作業への適応性を検討した。
成果の内容・特徴
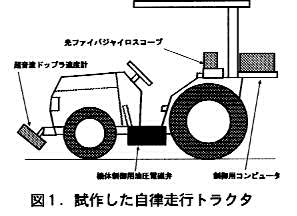
- ラクタが自律走行を行うため、機体の進行方向および進行速度を検出し、これらを時間で積分することによって位置を算出した。機体の進行方向検出には温度変動などの影響を受けにくい光ファイバジャイロスコープ(角度ドリフト0.5deg/h)を、進行速度検出には超音波ドップラ速度計を用いた(図1)。
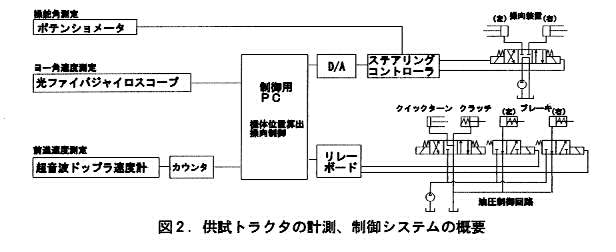
- 供試トラクタの各操作系は油圧電磁弁により駆動されている(図2)。ジャイロスコープ及び速度計からのデータを元に制御用PCが車両位置をリアルタイム認識し、そのデータから適時にステアリングコントローラにより操向制御を行う。ステアリングコントローラはポテンショメータから出力される電圧と制御用PCから出力される目標の電圧を比較して、操舵角を目標値に一致させるよう油圧電磁弁を操作する装置である。
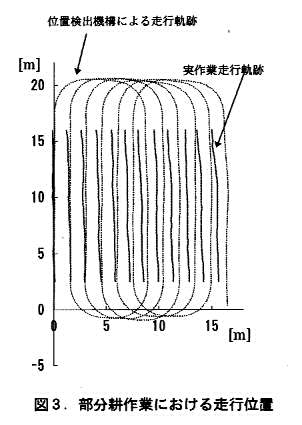
- 自律走行トラクタが直進と旋回を交互に組み合わせた経路を走行するための操向制御プログラムを開発した。直進区間では、機体が目標線に対して左右10cmの範囲内で走行するように制御、また旋回区間では、目標旋回角に達するまで操舵角を一定にして旋回させた。
- 以上の位置検出機構と操向制御プログラムによる自律走行トラクタを用いた部分耕施肥播種機(正転ロータリ2条、条間75cm、耕起幅9cm、作業速度1.2m/s)による耕起作業では、各条がおおむね平行となり良好な結果が得られた。速度計に検出誤差が生じていたため、位置検出機構による走行距離と作業跡から測定した実走行距離との間で約5%のずれを生じた(図3)が、このずれは速度計の較正により解決可能と判断された。
成果の活用面・留意点
- 平坦な圃場における施肥、播種の無人作業に対し適用可能である。
- 位置検出の累積誤差の補正、圃場の傾斜、高速での作業、各種作業機との対応についてはさらなる検討を要する。
具体的データ
その他
- 研究課題名:圃場状態認識型自律走行車両に関する基盤技術の開発
- 予算区分:総合的開発(軽労化農業)・経常
- 研究期間:平成7年(平成6~8年)
- 発表論文等:
(1)本田善文・糸川信弘・西村秀司*・芋生憲司*・竹永博*:農用車両の遠隔自動操舵に関する研究(第2報)、農業機械学会第54回年次大会講演要旨、31-32
(2)西村秀司*・本田善文・芋生憲司*・竹永博*・糸川信弘:牧草作業のためのトラクタの自動操舵に関する研究、農機誌、(58)2
注.*宇都宮大学農学部