傾斜草地広幅作業のためのクローラ車両の自動走行制御技術
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
クローラ車両に地磁気方位センサ、速度センサ、傾斜センサを搭載し、自己位置認識により、左右クローラの速度制御を行うことで、傾斜地での広幅作業を想定した設定経路自動走行が可能である。さらに、外部標識を検出することにより累積する誤差を補正し、より精度良く自動走行が可能である。
- 担当:草地試験場・山地支場・作業技術研究室
- 連絡先:0267-32-2356
- 部会名:作業技術
- 専門:機 械 作 業
- 対象:牧草類 農業機械
- 分類:研 究
背景・ねらい
車両転倒が人命に関わるような傾斜地において、安全性確保は最優先されるべきであり、自動走行による作業自動化の技術開発を行うことにより、傾斜地におけ る作業の安全性・快適性を向上させることができる。そこで、傾斜草地での安全で省力的な施肥作業を目的に、広幅作業を想定したクローラ車両の設定経路自動 走行制御技術について検討した。
成果の内容・特徴
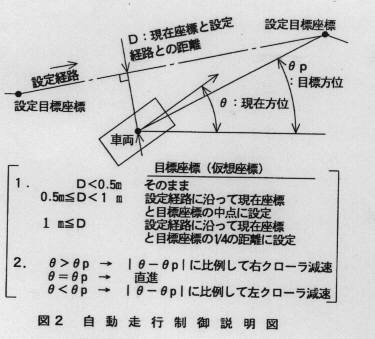
- 油圧駆動のクローラ車両には、地磁気方位センサ、レーダドップラ式速度センサ(車両の前後1個ずつ)、傾斜センサ(ロール、ピッチ方向)およびコンピュータが搭載され(図1)、傾斜補正した機体の方位と走行速度から自己位置を認識する。設定経路との偏差および目標方位と機体方位との偏差により左右クローラの速度制御を行って自動走行を行う(図2)。自動走行を行う圃場は、あらかじめ測量済みの圃場を対象とし、経路の設定は、測量データをもとにコンピュータ画面上でマウスにより入力する。
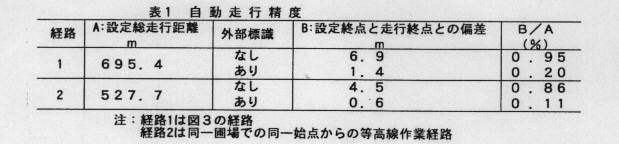
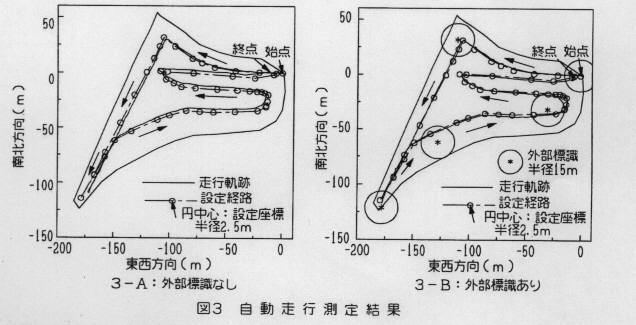
- 平均傾斜11度、面積1.35haの傾斜草地において、広幅の施肥作業を想定して設定した経路を設定速度0.5m/sで外部標識を検出 せずに自動走行した場合、設定経路との偏差は2.5m以内、設定終点と走行終点との偏差の総走行距離に対する割合は1%以内で走行可能である(表1)、(図3-A)。
- レーザー距離計とその方向角度を検出するポテンショメータ、左右水平首振り回転用のモータなどからなる外部標識検出器を用いて、座標既 知の外部標識として設置した光反射標識を検出することにより、内界情報のみで認識している自己位置の累積誤差を補正することができる。これを車両に搭載す ることにより、ほぼ設定した終点までの走行が可能である(表1)、(図3-B)。
- 最大傾斜18度までの斜面で自動走行が可能であるが、機構上、車両の横滑り成分を検出できないため、横滑りが大きい場合には累積誤差が大きくなる。
成果の活用面・留意点
- 傾斜草地における広幅施肥作業の自動化のための基礎技術として利用可能で、さらに圃場情報と組み合わせて、効率良い施肥作業を構築するための基盤技術となる。
- 傾斜地での横滑りを考慮すれば、外部標識の検出を併用して、累積誤差補正を行いながら自動走行を行う方法が望ましい。
具体的データ

その他
- 研究課題名:傾斜地自動作業のための走行制御技術の開発
- 予算区分 :総合的開発(軽労化農業)
- 研究期間 :平成8年度(平成6~8年)
- 研究担当者:玉城勝彦、瀬川敬、澁谷幸憲、飯嶋渡
- 発表論文等:傾斜草地における施肥作業を前提としたクローラ車両の自律走行、農業機械
学会第56回年次大会講演要旨、51-52、1997