バランス動作型重量物持ち上げ機
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
本機構は、対象被搬送物と本体との重量バランスを取りつつ動作する持ち上げ機構であり、1台の小型モータで駆動可能である。各種農業用資材の持ち上げ・保持・移動作業用の作業機の開発に応用し得る。
- 担当:草地試験場・飼料生産利用部・調製工学研究室
- 連絡先:0287-37-7803
- 部会名:草地・飼料利用
- 専門:機械
- 対象:農業機械
- 分類:研究
背景・ねらい
農業用資材のハンドリングにおいては、各種搬送装置への積み替え・投入時等に、人手による重量物の持ち上げ・保持・移動作業が多く残存している。この作 業を軽減するにあたり、工業用ロボットアームは高精度で汎用性はあるものの高価で重量が大きく、移動を伴う作業への適用は困難である。そこで、持ち上げ・ 保持動作と共に移動も可能な農作業用ハンドリング機構を開発する。
成果の内容・特徴
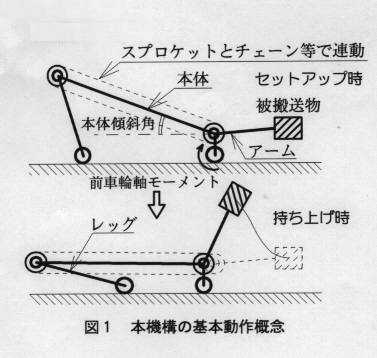
- 基本動作概念を図1に示す。まずレッグを駆動し、本体後部を持ち上げて、全体を傾斜させ位置エネルギーを蓄積する(セットアップ時)。この状態から、本体後部を重力により降下させると、レッグがたたまれるように回転し、その回転が伝達されアームが駆動される(持ち上げ時)。
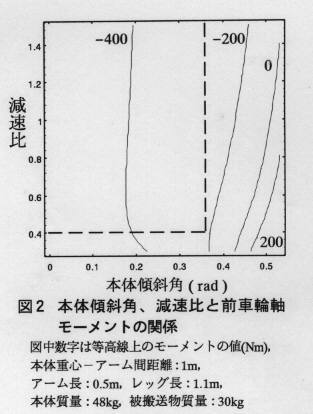
- 被搬送物に対し重量バランスをとり、位置エネルギー伝達を可能とするために、機構諸元が満たすべき条件を数値的に解析した。本体傾斜角及びアーム軸-レッグ軸間の減速比と前車輪軸モーメントの関係の解析例を図2に示す。アームとレッグとの連結をクラッチで断続し不連続に減速比を変化させ、モーメントを常に負とすることによって動作が可能になる(図中点線)。この場合、動力はセットアップ時にのみ必要である。
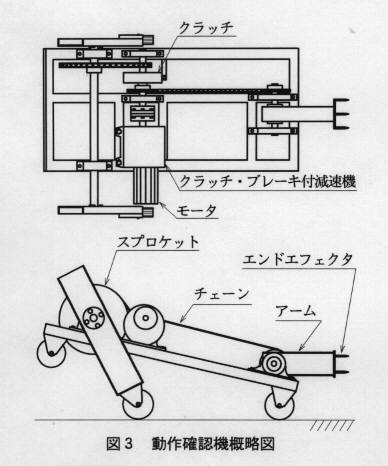
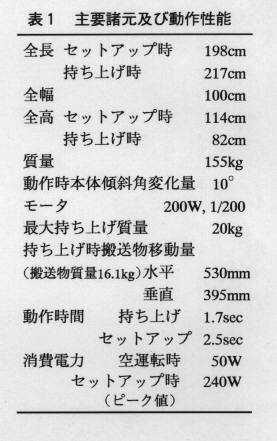
- 本機構の動作を検証するために、動作確認機を製作した(図3)。本機はコンパクトベール保持用のエンドエフェクタを装備し、クラッチの断続は、本体-レッグ間の角度を光電スイッチにより検出して行なう。20kgのベールに対し所期の持ち上げ動作が可能であり、セットアップに使用する200Wの小型モータ1台で動作した(表1)。また、ベールの移動軌跡は、持ち上げ時に機構全体がレッグ方向へ移動するため水平成分が大きく、本機は対象被搬送物を手前へ引き出しつつ持ち上げるという特徴を持つ。
成果の活用面・留意点
- 重量物ハンドリングのための新たなメカニズムとして、梱包乾草の拾い上げや濃厚飼料のホッパへの投入等、各種作業に本機構を応用することができる。
- 対象被搬送物の形態・質量に合わせて機構の各諸元を最適化するとともに、エンドエフェクタを製作する必要がある。
具体的データ
その他
- 研究課題名:軽量バランスハンドリング技術の開発
- 予算区分 :総合的開発研究(軽労化農業)
- 研究期間 :平成8年度(平成6~8年)
- 研究担当者:天羽弘一、佐々木泰弘(現 九州農試)、喜田環樹、市戸万丈
- 発表論文等:第56回農業機械学会年次大会(1997)