搾乳機における高拍動比・分房別拍動停止制御システム
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
従来の搾乳機よりも高い拍動比で搾乳し、搾り終わった乳頭から搾乳を順次停止する制御法を開発した。本制御法では、搾乳時間が短縮され、空搾りによる乳頭への負荷が少なくなる。
- 担当:畜産試験場 飼養環境部 施設研究室
- 連絡先:0298-38-8678
- 部会名:畜産
- 専門:飼育管理
- 対象:乳用牛
- 分類:研究
背景・ねらい
搾乳牛の泌乳能力の向上と飼養規模の拡大とともに、省力的で高精度な搾乳管理技術の必要性が高まっている。そこで、従来の搾乳機より短時間で搾乳を完了し、過搾乳等による搾乳牛への負荷が少ない高拍動比・分房別搾乳制御法を開発する。
成果の内容・特徴
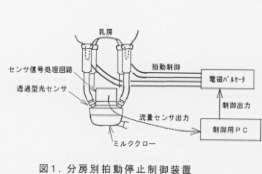
- 高拍動比・分房別拍動停止制御システムは、従来の搾乳機よりも高い拍動比(75:25)で搾乳しながら、ミルククローに装着した小型の透過型光センサで各乳頭の乳汁流量を検知し、制御用コンピュータで所定の流量よりも低下したことを判断して、搾乳ストールに設置した電磁パルセータを制御して乳頭毎に搾乳を停止する(図1)。なお、試作したミルカユニットは真空2系統で、重量は従来のものと同じ2.4kgである。
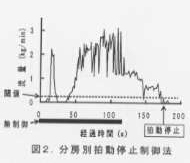
- 所定の流量に低下した時に拍動を停止する制御法において(図2)、①泌乳開始後 120s程度の無制御時間を設ける、②拍動停止の判断は3拍動連続して閾値より流量が低下した時とする、③閾値を0.15~0.2kg/min程度に設定する、とした条件のもとで、残乳が少なく早期停止や離脱遅延が生じない制御ができる。
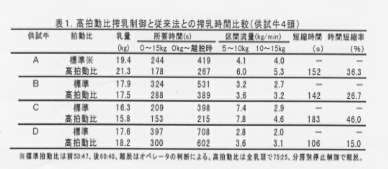
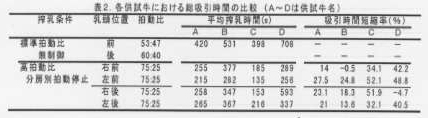
- 供試牛4頭を本システムの実搾乳に適用した結果から、個体差はあるものの、搾乳時間を平均で30%程度短縮できると推測される(表1)。また、 同一の牛において最後に拍動停止した乳頭と他の乳頭間での搾乳時間差は2~342s(平均109s)であり、この間の空搾りを抑えることができる。さらに、残乳を平均で85gに抑えることができ、1乳頭当たりの吸引時間が従来の搾乳機より平均して約30%短縮される(表2)。
成果の活用面・留意点
- 従来の搾乳機より搾乳時間が短縮され、乳頭毎に空搾りを自動的に防止するので、ミルキングパーラ等で同時に多頭数搾乳するシステムへの適用が効果的である。
- パイプラインミルカ等の可搬型のミルカに適用する場合は、制御用PCや電磁パルセータの小型・軽量化が必要となる。また、本システムが乳量・乳質、および、乳頭へ及ぼす影響については、別途、長期連用試験で検討する必要がある。
具体的データ
その他
- 研究課題名:高速搾乳制御法の検討
- 予算区分:経常
- 研究期間:平成9年度(平成5~9年度)
- 発表論文等:ミルカにおける分房別搾乳制御法に関する研究(第一報). 平成9年度農業機械学会関東支部年次報告 6-7 (1997)