バランス動作型軽量持ち上げ機構
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
本機構は、機体と被搬送物との重量バランスを取り、機体の質量を利用して動作する持ち上げ機構である。小型モータ1台で駆動される単純かつ軽量な機構であり、機体質量の約半分を持ち上げることができる。各種農業用資材の持ち上げ・保持・移動作業用作業機の開発に応用し得る。
- 担当:草地試験場・資料生産利用部・調製工学研究室
- 連絡先:0287-37-7803
- 部会名:飼料利用
- 専門:機械
- 対象:農業機械
- 分類:研究
背景・ねらい
農業用資材、特に粗大物資(粗飼料・糞尿・堆肥・土壌・圃場残渣等)のハンドリングにおいて、人手による 重量物の持ち上げ・保持・移動作業が未だ多く残存 する。持ち上げ・保持動作と共に移動も可能で、かつ軽量・シンプルなハンドリング機構を開発し、人力作業 を補助する作業機の開発に資する。
成果の内容・特徴
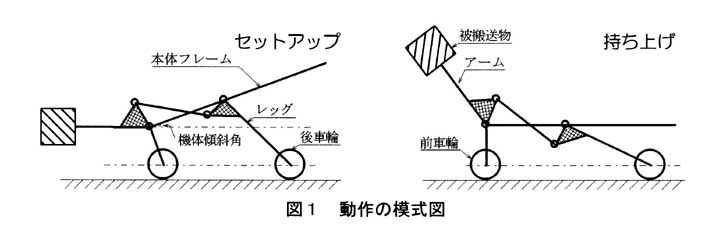
- 図1に 本機構の動作模式図を示す。アームとレッグ及びその連結リンクと本体フレームは、4節リンクを形成する。 まずレッグを駆動し、機体後部を持ち上げて、全体 を傾斜させ位置エネルギーを蓄積する(セットアップ)。機体後部を重力により降下させるとレッグが本体フ レーム方向に回転し、連結リンクによりアームが従 動して被搬送物を持ち上げる(持ち上げ)。動力はセットアップ時にのみ必要である。
- 図1に おける機体傾斜角及び被搬送物質量、各リンク長やそれらの取り付け角度等による前車輪軸回りのモーメント の変化を数値的に解析し、機構の動作可能条件を求 めた。各リンク長を適切に設定することにより、大きなアーム駆動トルクが必要となる持ち上げ動作初期に機 体角速度>アーム角速度とすることができ、アーム 駆動トルクを高めた。
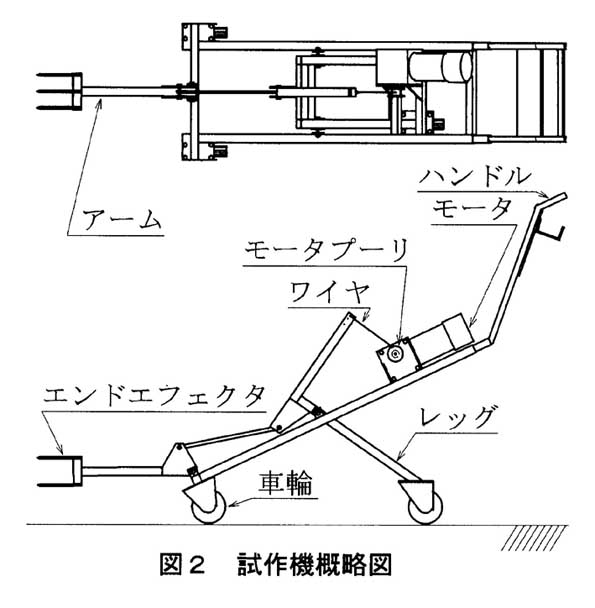
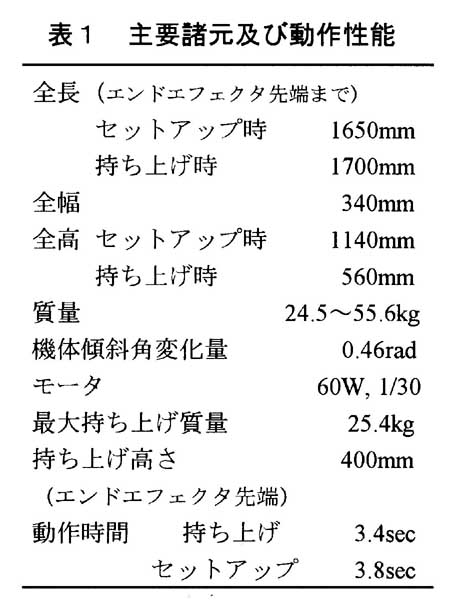
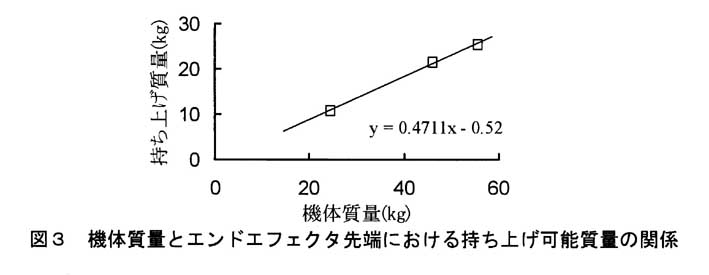
- 試作機を製作し動作試験を行った。本機の主要部品はセットアップに使用する60Wの小型モータ1台 のみであり、単純かつ軽量な構成である( 図2 、 表1)。アーム先端には、コンパクトベール保持用のフォーク状エンドエフェクタを装備した。エンドエフェ クタ形状に合わせた穴を加工したパレットを用いることにより、肥料・飼料袋なども扱えた。機体質量と持ち 上げ可能質量との関係を 図3 に示す。機体質量を追加ウェイトにより増加させると持ち上げ可能質量は直線的に増加し、機体質量の約半分 に対して持ち上げ動作が可能であった。
成果の活用面・留意点
- 粗大物資ハンドリングのための新たなメカニズムとして、梱包乾草の拾い上げや濃厚飼料のホッパへの投 入をはじめとする各種作業に本機構を応用することができる。
- 機構質量は被搬送物の質量に合わせて最適化する必要がある。また、被搬送物の形態に合わせたエン ドエフェクタが必要である。
具体的データ
その他
- 研究課題名:粗大物質のバランス搬送技術の開発
- 予算区分 :総合的開発研究
- 研究期間 :平成10年度(平成9~10年)
- 研究担当者:天羽弘一、喜田環樹、市戸万丈
- 発表論文等:本体-被搬送物系バランス型ハンドリング技術の開発(第2報)
第58回農業機械学会年次大会講演要旨集、1999
重量物持ち上げ装置、日本国特許第2869530号