防風林に囲まれた圃場におけるGPSによる位置認識精度
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
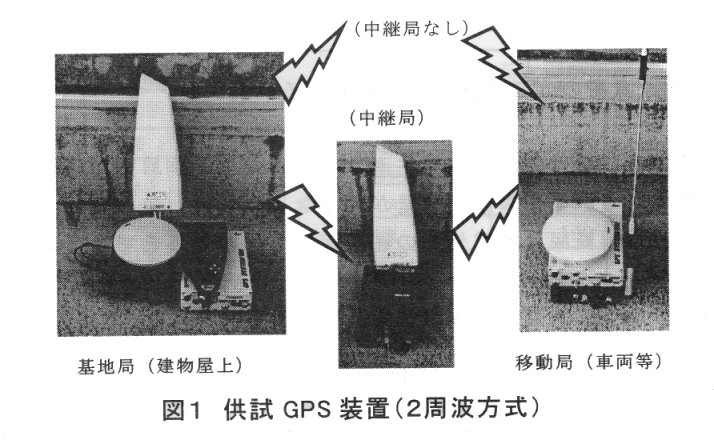
供試した2周波方式の高精度GPS(RTK-GPS)とGPS基地局との通信に中継局を用い れば、防風林等の影響を受けることなく自律走行および精密農法のための車両の位置を高精度 に安定して取得することができる。
- 草地試験場・飼料生産利用部・栽培工学研究室
- 連絡先:0287-37-7801
- 部会名:生産管理
- 専門:機械・作業
- 対象:牧草類、農業機械
- 分類:研究
背景・ねらい
圃場内における車両の位置を高精度かつリアルタイムで認識することは、自律走行、作業の自 動化や精密農法のために必要な基盤技術の一つである。GPSの進 歩、普及はめざましいものがあり、これを用いた圃場での省力機械作業を可能とする走行制御 システムのための高精度な車両位置認識手法の導入が必要である。
成果の内容・特徴
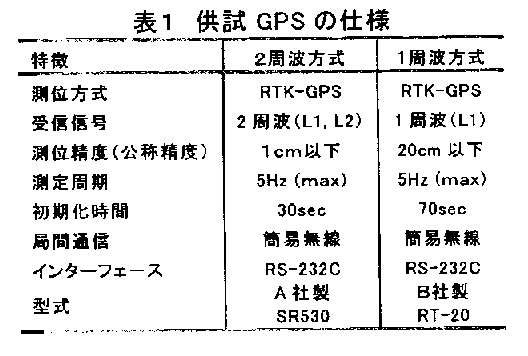
- GPS装置は、基地局、移動局および補正データを移動局へ送るための特定小電力の無線装
置からなる。中継局を用いない場合は、防風林の影響を受けない条件で基地局と測定点(移動
局)との通信距離は最長800mである
(図1 、
表1 )。
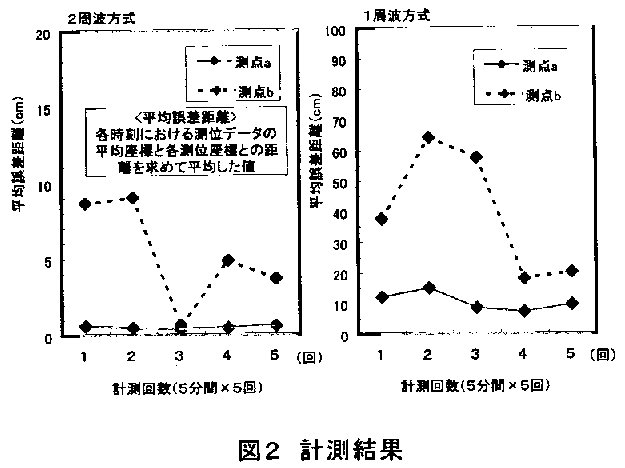
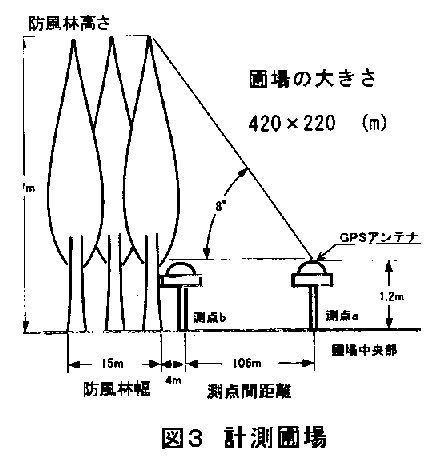
- 1周波方式のGPS(L1帯)の場合、圃場中央(測点a)では、仕様書どおりの測位精
度(平均誤差距離)20cm以下が得られるが、圃場周辺の防風林の隣接部(測点b)では、精度
劣化や基地局との通信が途切れることがあり、測位精度が20~65cmと劣化する
(図2 、
図3 )。
- 2周波方式のGPS(L1帯+L2帯)の測点bにおける測位精度は、仕様書より劣るが平
均で5.4cmであり、防風林の影響を受けるが、高精度の測位が安定して可能である
(図2 。
- 無線の中継局は基地局からできるだけ見通しのきく圃場端に設置することで、基準 局から陰になる測点bにおいても補正データを常に取得可能である。
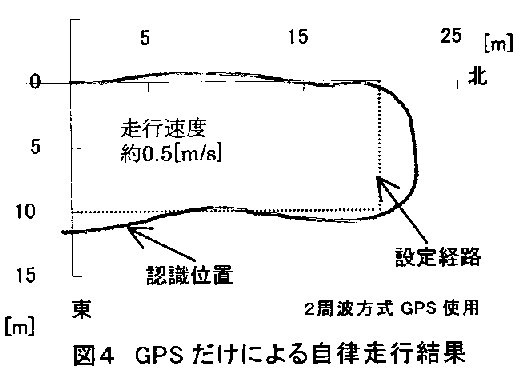
- 2周波方式のGPSは、他のセンサと組み合わせることで自律走行車両用位置計測セン
サとして利用可能である
(図4) 。自律走行車両の制御方式の検討を行うことで、低速作業(0.5m/s以下)ではGPSだけによる 自律走行も可能と考える。
成果の活用面・留意点
- GPSは防風林の影響を受けるが、供試した2周波方式のGPSは、防風林の隣接部での測位精 度は、自律走行の位置検出センサとして利用できる。
- 高速作業(2.0m/s以上)では、GPSデータの測定周期は仕様書の周期以上の20Hz程度 が必要である。
具体的データ
その他
- 研究課題名:GPS応用による圃場内走行位地認識手法の開発
- 予算区分 :作物対応研究[軽労化作業]
- 研究期間 :平成11年度(平成9年~11年)
- 研究担当者:沢村 篤、岡戸敦史、住田憲俊、梅田直円、伊藤信夫、加茂幹男、伊吹俊彦
- 発表論文等:飼料生産圃場における自律走行トラクタに関する研究-防風林のGPSデータ への影響-、第58回農業機械学会年次大会講演要旨、367-368、1999