牛の発育を把握するための歩行通過型背線高測定装置
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
牛の保定,姿勢制御の必要がなく歩行中の背線高を測定することが可能な装置。繰り返し測定した歩行時背線高の変動係数は,0.3~1.2%の範囲にあり,安定的に測定でき発育の簡易把握が可能である。
- 担当:草地試験場・放牧利用部・施設工学研究室
- 連絡先:0287-37-7814
- 部会名:永年草地・放牧
- 専門:機械 作業
- 対象:家畜類
- 分類:研究
背景・ねらい
センサで測定可能な発育指標としてき甲より後方の背線の高さの平均値を背線高と定義した。歩行中の背線高(歩行時背線高)は,繰り返し測定した場合の変 動係数も小さく,体高,十字部高と相関が高いことから育成牛の発育の簡易把握に有効であることを示した。そこで,省力的に歩行時背線高を測定するための歩行通過型背線高測定装置を開発する。
成果の内容・特徴
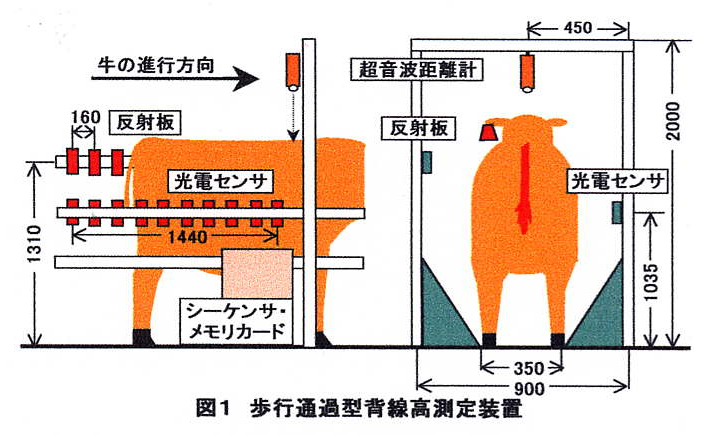
- 本装置は,通路,10個の光電センサ,超音波距離計,シーケンサから構成されている (図1) 。 通路は,歩行を制御するために足下を350mmに狭める。通路に160mm間隔で光電センサを設置し,牛の尻部が光電センサを通過するたびに超音波距離計で背線の高さを測定する。データは,シーケンサのメモリカードに記録され,パソコンで処理される。
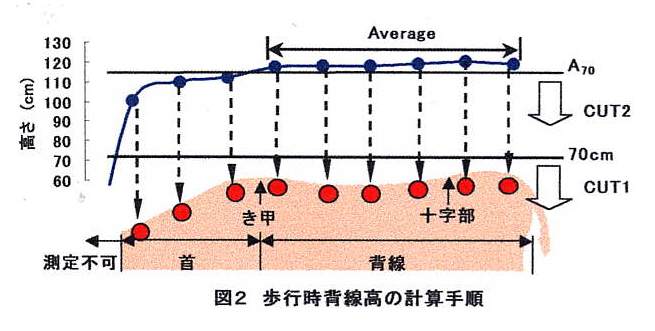
- 測定データからの歩行時背線高の算出手順は,以下の通り (図2) 。 手順1.高さ70cm以下の値は,超音波距離計の測定可能範囲から外れるため切り捨てる(CUT1)。 手順2.残った値の平均値(A70)を求める。 手順3.A70以下の値は,首部と推定され切り捨てる(CUT2)。 手順4.残った値の平均値が歩行時背線高となる。
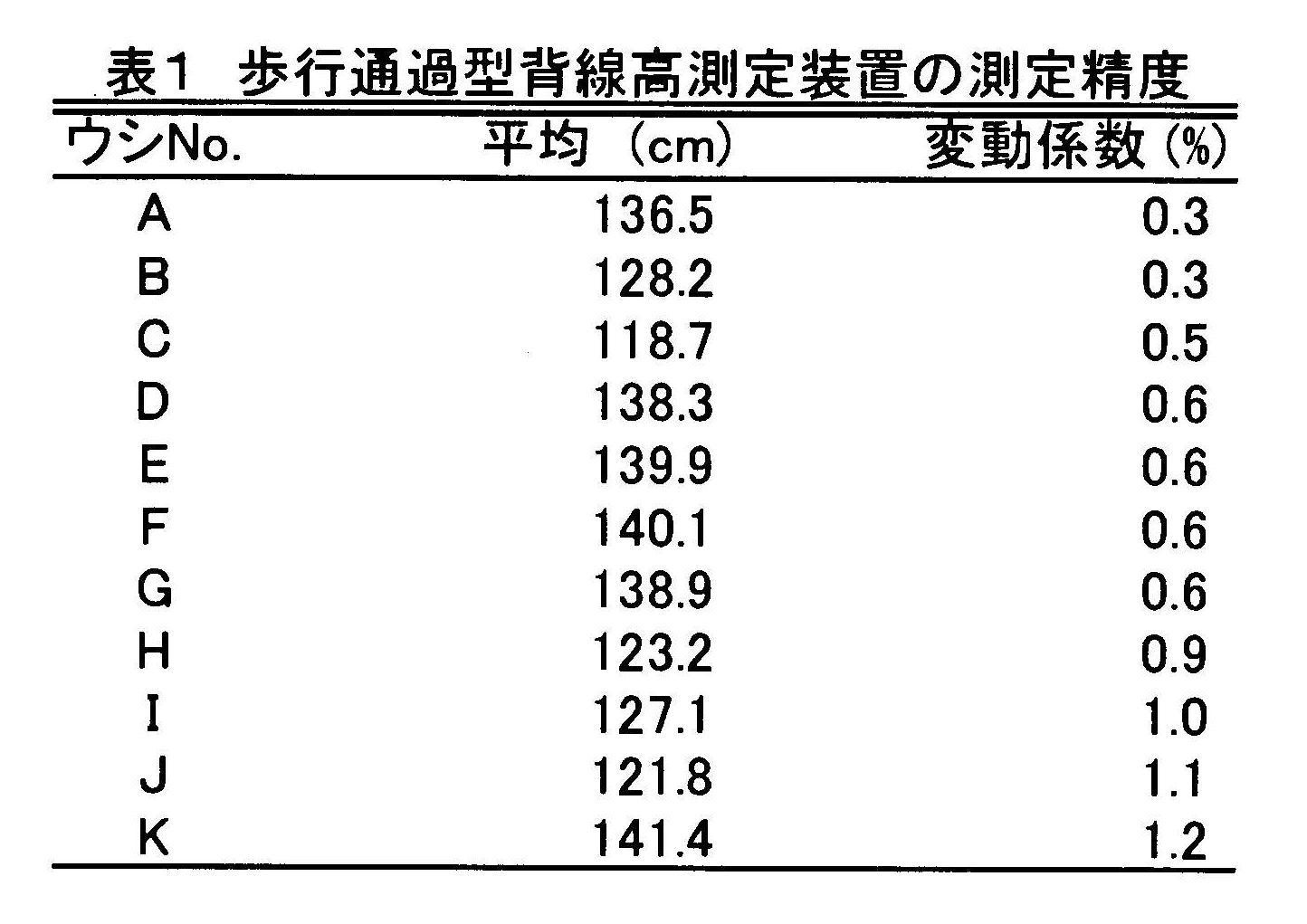
- 体高116.0~145.8cmのホルスタイン種11頭を供試し測定精度試験を行った。歩法は,常足と速足(歩行速度 は0.7~5.0m/s)であった。歩行時背線高の算出に寄与した測定データの個数は,4.5~8.2個であった。また,変動係数は,0.3~1.2% で,9頭の牛で1.0%以下である (表1) 。これは, ビデオで測定した歩行時背線高の変動係数と同程度であり,本装置は安定的に測定が可能である。
成果の活用面・留意点
- ホルスタイン種育成牛の発育簡易把握,繁殖供用への適否の判断等に活用できる。
- 超音波センサを使用しているため,風が強い日は使用を避ける。
具体的データ
その他
- 研究課題名:放牧牛の発育診断システムの開発
- 予算区分 :連携実用化
- 研究期間 :平成12年度(平成12~14年)
- 研究担当者:梅田直円,伊藤信雄,阿部佳之,福重直輝,中野貞雄(富士平工業),一柳まさみ(富士平工業)
- 発表論文等:歩行通過型背線高測定装置の開発,日本家畜管理学会誌,37-1,52-53,2001 牛の背線形状と体高,十字部高との関係の解明,日本畜産学会第98回大会講演要旨,179,2001