ICT・複数のセンサを使用し牛の発情を示す乗駕許容行動を判別するシステム
要約
赤外線、加速度および角速度センサで構成されたユニットを牛の背部に装着し、ICTを活用することで、授精適期時刻の推定に重要な指標である乗駕許容行動を98%の適合率で検知し、観察困難な時刻、場所でもリアルタイムに監視可能なシステムである。
- キーワード:ICT、赤外線・加速度・角速度センサ、乗駕許容行動、行動判別アルゴリズム
- 担当:寒冷地肉用牛飼養
- 代表連絡先:電話019-643-3541
- 研究所名:東北農業研究センター・畜産飼料作研究領域
- 分類:普及成果情報
背景・ねらい
国内の子牛生産は一部の肉用品種を除き、人工授精あるいは胚移植が利用されている。これらの技術は発情日の把握が必須であり、特に人工授精では授精適期決定のため発情の開始、終了時刻およびその期間の行動変化を把握する必要がある。最も明瞭な発情行動である乗駕行動の持続時間は14~21時間と短く、また、発情周期は約21日間隔であるため、見逃しによる経営的損失は数万円にも及ぶ。従って確実に発情行動を把握することは繁殖農家の経営上極めて重要であり、発情行動を正確に検知する安価な技術が求められている。
成果の内容・特徴
- 発情兆候を示す個体に対する他牛の乗駕行動を検知し、乗駕行動の許容または忌避を正確に判別、タブレット等の携帯端末で確認できるシステムである(図1A、B)。
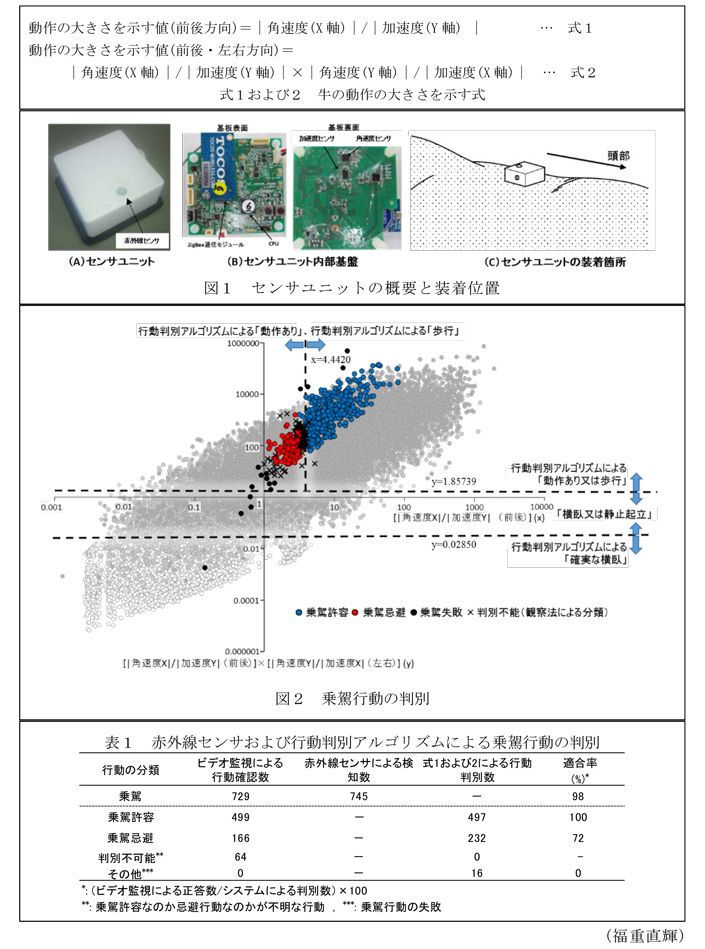
- 開発したセンサユニットを「他牛の乗駕行動を検知できる牛背面部位」、「装置を装着した個体自身の鼻等で触れられない部位」、「装着が安定する部位」等の条件を満たす部位に装着することで(図1C)、赤外線センサが装着牛十字部付近における他牛の存在を検知し、他牛による乗駕行動として判別する。
- 乗駕行動中の加速度(m/s2)と角速度(deg/s)の平均値を式1および2によって解析すると、行動判別アルゴリズムによる「歩行」域に乗駕許容行動が多く分布し、「動作あり」域に乗駕忌避行動が多く分布する。よって、赤外線センサおよび行動判別アルゴリズムを使うことで、乗駕に対する許容、忌避行動の判別が可能である(図2)。
- 観察法による行動分類と本システムでの乗駕行動の検知・判別結果の適合率は、乗駕行動の検知で98%、乗駕許容行動の判別は100%であり、本システムは目視による監視の代替法として利用できる(表1)。なお、本システムによる乗駕行動の検知数は観察法での確認数より多く、これは観察法では夜間や視界不良等による乗駕行動の見逃しがある可能性を示している。
普及のための参考情報
- 普及対象:繁殖農家、人工授精師、獣医師、畜産資材メーカーおよび研究者
- 普及予定地域・普及台数:大規模繁殖農家、大手農業団体に10台導入予定(2016年)
- その他:本システムは開発したセンサユニットと中継器、市販のルータとタブレットで構成され、通信範囲は500m、監視可能頭数は同時に10頭まで確認済である。管理者が観察困難な夜間の乗駕許容行動も検知可能であり、乗駕許容行動の開始時刻を基準とした人工授精適期時刻が推定可能である。
具体的データ
その他
- 中課題名:寒冷積雪地帯での土地資源と自給飼料を活用した肉用牛飼養技術の開発
- 中課題整理番号:120d2
- 予算区分:交付金、競争的資金(Sイノベ)
- 研究期間:2011~2015年度
- 研究担当者:福重直輝、伊賀浩輔、志水学
- 発表論文等:福重ら「乗駕行動検出装置及び乗駕行動検出方法、プログラム」特願2014-170641(2014年8月25日)