ナスの自動収穫システム
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
一定の大きさのナスを選択的に摘み取る自動収穫システムを開発し た。本システムは,画像処理により果実を認識し,ビジュアルフィードバック を用いてマニピュレータ先端を接近させたのち,収穫用ハンドにより果実の摘 み取りを行う。
- キーワード: ナス、自動収穫システム、画像処理、ビジュアルフィードバック、マニピ ュレータ先端、収穫用ハンド
- 担当:野菜・茶業試験場 施設生産部 機械利用研究室
- 連絡先:0569-72-1564
- 部会名:野菜・茶業,作業技術
- 専門:機械
- 対象:果菜類
- 分類:研究
背景・ねらい
ナスの収穫は手作業で行われ,作業者は,大きさの異なる果実が点在する中から,一定の大き さの果実のみを選択的に摘み取っている。この収穫作業を自動化し 労働時間の短縮を図ることは,重要な課題である。そこで,果実の認識,果実への接近,把持 ・摘み取りの基本動作を,画像処理,マニピュレータ,ハンドで置 き換えることにより自動収穫システムの開発を目指す。
成果の内容・特徴
- 本システムは,2台のパソコン,CCDカメラ,画像処理ボード,マニピュレータ,コントロ ーラ,収穫用ハンドから構成される (図1) 。
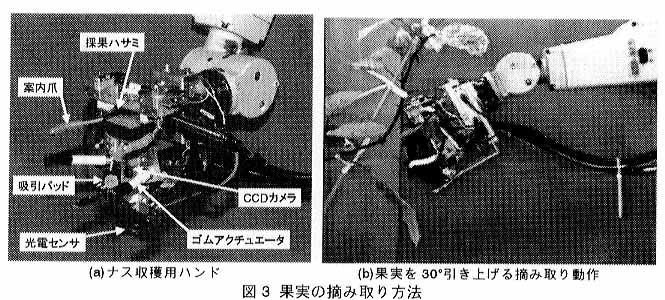
- 本システムは,画像処理により認識した果実画像 (図2) を追跡するように,ビジュアルフィードバックを用いてマニピュレータを制御し,ハンド (図3-(a)) を 果実に接近させる。そして,吸引パッドとゴムアクチュエータで果実を把持したのち,果頂を 検出する光電センサと,上下移動し果実基部を検出する案内爪との 距離から,収穫適否(果実長125~165 mm)を判定する。さらに,採果ハサミを駆動させ果柄を切断する。このとき,案内爪は,その 先端が湾曲していることから,果柄を固定することができる。
- 収穫用ハンドを0.4 MPaの圧縮空気で駆動することにより,果実に傷つけることなく 安定して把持することができ,果柄の切断を行うことができる。
- 摘み取り動作時に,果実を30°程度引き上げることにより,茎葉が収穫ハンド内に 巻き込まれるのを防ぐことができる (図3-(b)) 。
- 本システムの現在の収穫成功率は52.5 %である (表1) 。また,果実1果を収穫する時間は約62秒である。果実基部の検出と果柄切断を合わせた摘み 取り動作を9 秒程度で行うことができる (表2) 。
成果の活用面・留意点
- 本システムは,ナスの収穫基本動作を遂行することができ,収穫ロボットを開発するため の基本要素となる。果実が本システム側に露出するような状態で動作させる必要がある。また ,収穫適否の判定精度の向上や施設内の移動走行技術との融合が必要である。
具体的データ
その他
- 研究課題名:果菜類の選択的収穫技術の開発
- 予算区分 :総合的開発研究「軽労化農業」
- 研究期間 :平成11年度(平成9~11年)
- 研究担当者:林茂彦・雁野勝宣・鹿沼隆宏
- 発表論文等:Machine Vision Algorithm of Eggplant Recognition for Robotic Harvesting. 植物工場学会誌 12(1), 38-46, 2000.